PROJECT DEVELOPMENT STUDIO

To do:
1.Transpose important elements from the above “map”
I had a very specific topic of interest I would like to explore – the open source hardware system and agent-based software architecture for a universal-joint system for individual units that self-assemble into a biomimetic linear, snakelike robot that is adaptable for different purposes and functions.
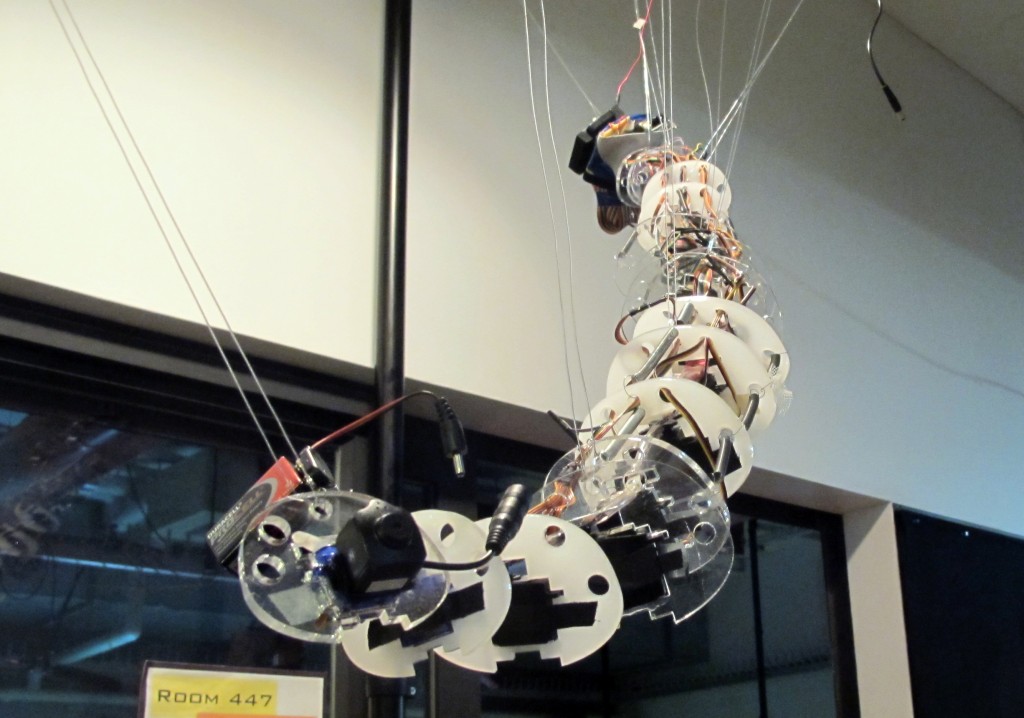
However, I would like to instead build a large scale (2 meter?) vertebrate like robot in a finished form. This will be an aesthetic design that stems out of the idea and project, Protei, that I am working on, which is an open source prototype for a fleet of semi-autonomous or remote controlled, segmented, shape shifting, oil-collecting sailboat drone. I would like to create both DIY kits for a fully segmented and articulated robotic snake, with a software package, mechanical designs, and electronic architecture, for a smaller simpler version of this boat, but focus on the large scale model and the concept of biomimicry in science and art.
I believe I have to hone in on the unification of the above utilitarian function and inspiration, while also developing the concept of giving life and autonomy to a machine (that can therefore possess its own life cycle), the transformation of human body/mind by modern technology, beauty in the grotesque, the commodification of technology and body…
So… how can I move forwards and converge all of the above (how can I justify making an “aesthetic object”, with the function only as a prompting driving impulse)
2. 3 developments:
1. Bill of materials; Finish instructables for the DIY kit (as an example):
2. write – a description of moving forwards
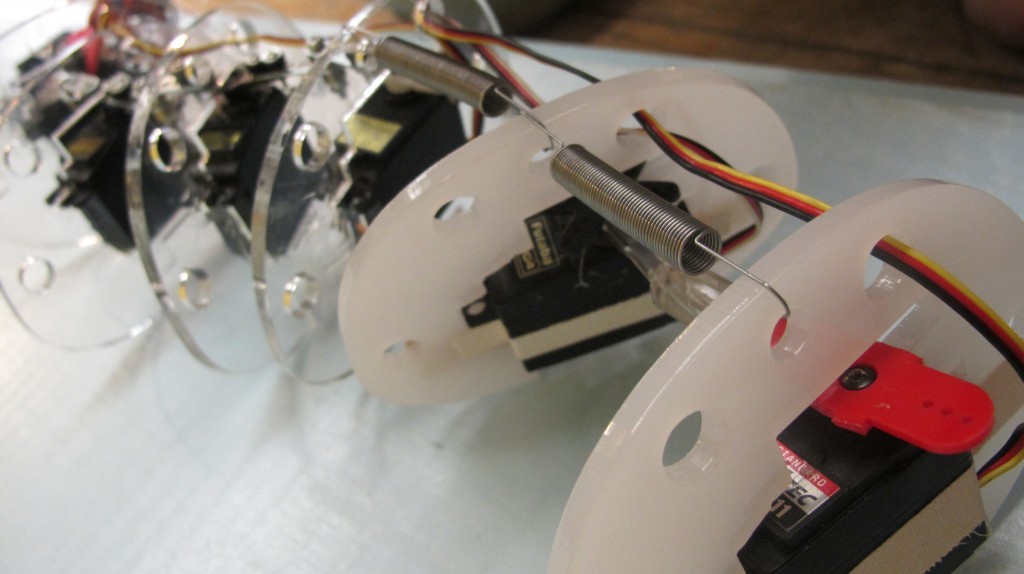
3. Finish the Arduino “snakeWave” class and implement it with the hardware I have started to use to model the snake with servos; Make a software representation of the wave in processing of the individual segments – Software progress : Servo_wave class for arduino
![]()



3a. Gather research papers :
1. Application of AI Techniques for Modelling of a Snake’s Motion, Zenon Chaczko, Perez Moses (Australia)
2. Bio-inspired Agent-based System for Cooperative Decision-making and Control of Unmanned Aerial Vehicles
3. Software Infrastructure for Wireless Sensor and Actuator Networks
4. Ant-Based Topology Convergence Algorithms for Resource Management in VANETs
5. Neuro-Immune-Endocrine (NIE) Models for Emergency Services Interoperatibility
… and more
BOOKS I have :
Neurotechnology for Biomimetic Robots
Self Reconfigurable Robots
Autonomous Robots: From Biological Inspiration to Implementation and Control
Biomechanisms of swimming and flying
3b. A few artists and pieces to look into for ‘maps’ of inspirations:
Alexander McQueen, Untitled Spine Corset
David Cronenberg (and J.G. Ballard), Crash
Tetsuo, Shin’ya Tsukamoto
Natalie Jeremijenko, Amphibious Architecture
U Ram Choe: Custos Cavum
Interview with the creators project
4. map one of your inspirations’ projects based on the criteria in the map/brainstorming session.
URam Choe’s Custos Cavum:
Categories:
· Forms (video, sculpture, website, diorama, comic book, collage).
-sculpture
· Materials (concrete, plexiglass, living tissue, rice paper, cake)
-steel, stainless steel, brass, aluminum, resin, CPUs, motors
· Scale (use analogies: big as a house, small as a marble)
-as big as a large truck in its entirety, (basically the size of a large seal), but parts of the piece span upwards vertically towards the ceiling and horizontally across the floor
· Affects/emotions (clumsy, cheerful, morose, businesslike)
-grandiose, awe-inspiring, courageous, fear inspiring, stoic, cold, uninviting, of fortitude, somber, tranquil, subtle, impressive, magnificient, aggressive, autonomous, iconographic, cosmic, idealic, center, universal, ecstasy, primordial, territorial
· Verbs (motivate, collapse, upset, tickle, spin, collect, etc)
-protect, ward off, illuminate, care, defend, shimmer, breathe, live, cycle, guard, idolize, transcend, destroy, gesture, dominate
· Motivations (why do you want to do/explore this? your reason, underlying impulse, larger aim?)
-explore the feeling of awe and transcendance that one gets from religion (this piece is inspired by Shiva as the Lord of Dance, in India), ie from going into a church or dominating piece of architecture, through a machine
-give life and autonomy to a machine – power it on and it has a life of its own.
-a group of humans come together to give birth to this creation
– explore religion through an object, through the electromechanical design – give it life, and it surely takes on a life of its own, the sum of which is greater than the parts (many humans from different disciplines come together to make a machine that can be more powerful than humans); This creature protects and dominates over its realm; It eventually decays (rusts, dies)
-explore the spiritual through a machine creation that resembles life but does not mimic it.
· Inspirations (projects, people, contexts that inspire you to follow this hunch)
-Buddhism, life cycle,
-transformation of human psychology by modern technology
-beauty in the grotesque
-Theo Jansen – the fusion of nature and technology with nothing but power from the natural world (wind in some cases)
-Rube Goldberg, Alexander Calder, Arthur Ganson, Lyman Whitaker, László Moholy-Nagy (and other kinetic sculptors)
-Tetsuo (metal fetishist)
· Ideal audiences (be specific: Guyanese senior citizens, tech geeks in Brooklyn or Fukushima, 3-5 yr old Americans, white hipsters, demographic, economic, social circles)
-Upper west side shrinks, Asian Buddhists and non-Buddhists, Artists and hobbyists fascinated with kiinetics, artists of all sorts, kids, serious people, spiritualists, people who love literature and/or history
· Context/location (gallery, dark alley, the internet, public park, suburban cul-desac)
-vast space, atrium, lobby, serene place, gallery or museum or performance space
Lastly, take your temperature on what you discovered or explored today in class:
· What are the first steps?
-firmware (Arduino), hardware model, mechanical platform, hone in on how to talk about the concept of this – unite the functionality of these robots with the aesthetic vision I have
· Is it big enough to interest you for a whole semester?
-Yes
· If it is enormous, what aspect of this core idea can you tackle?
-It is enormous, so I am tacking not what interests me utmost (the hardware of a joint system for a modular self assembling robot made up of multiple independent units) but the aesthetics of one developed biomimetic snake robot that is a more developed version of smaller open source models and prototype for which I will have DIY kits, for small functioning skeletons of a robotic boat that can do things like: clean up polluted waters, biological sampling, nuclear waste monitoring; larger environmental impacts: crowdsourced oil spill cleanup with swarms of drones…