Archive for January, 2012































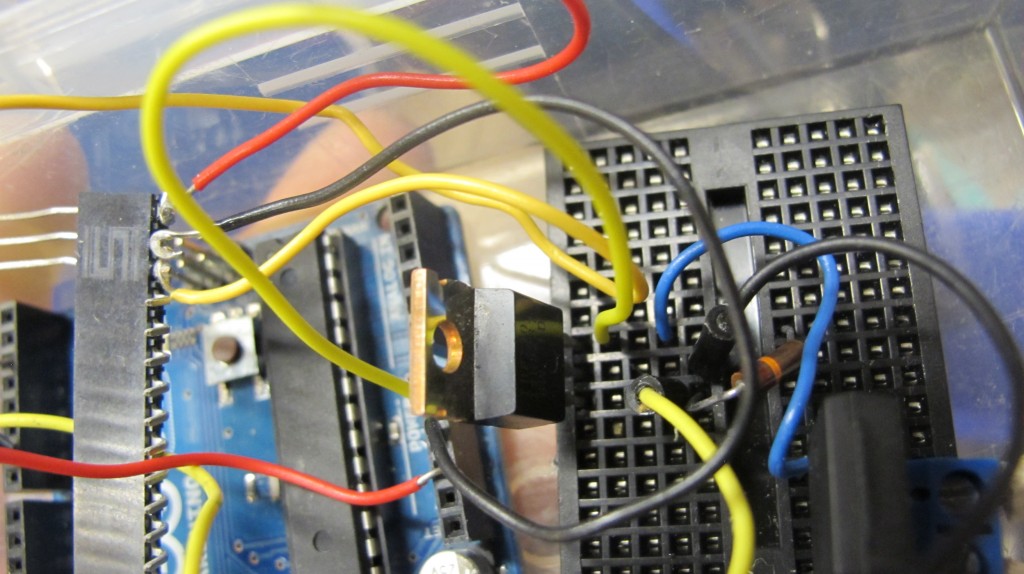
AC DIMMER Circuit!!
I adapted this from info from Dmitri Grinberg’s post on Hackaday, “Lamp Fading and Remote Control for the Lazy”.
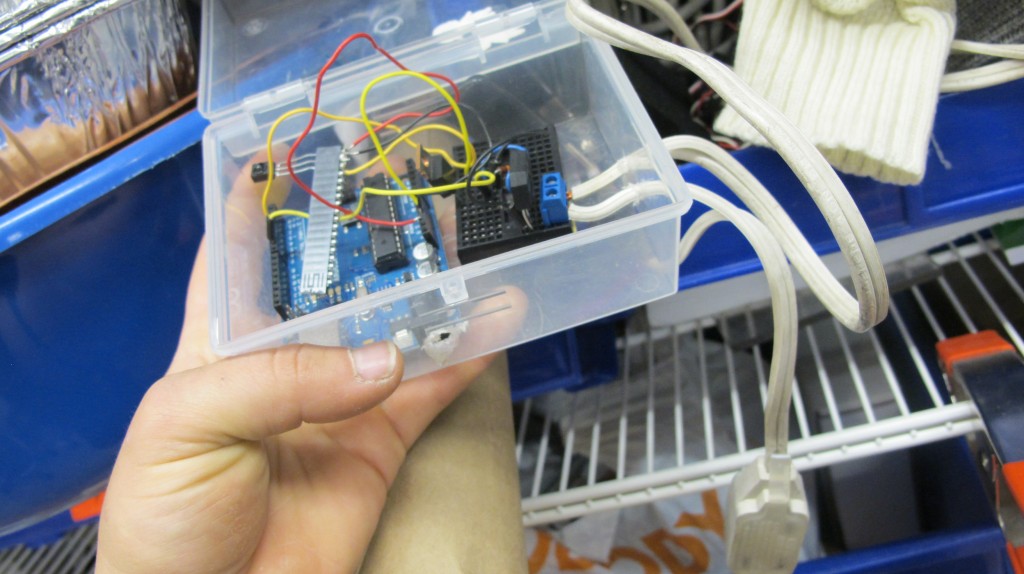
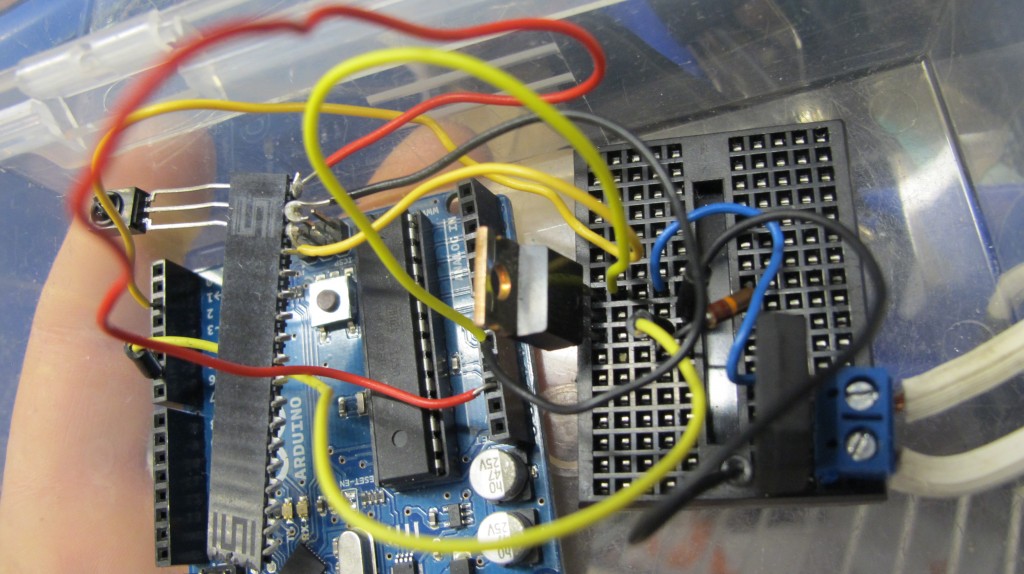
I have been trying for a number of weeks to perfect this, as in, find the correct transistor that would not overheat or burn out (one that is rated for a high enough voltage since it’s using AC 120 V). I followed this circuit from Dmitri’s blog, except instead of the IRF 250 I used an IRF730. 
At first, I was using the IRF 520, with a 100 V drain source voltage and a 9 amp continuous drain current. It worked fine at first, and then it burnt out (there was connectivity between the gate-source and gate-drain). So I got an IRF540, with a 100 V drain source voltage and a 33 continuous drain current. This similarly worked at first, then burnt out.
Finally, I used the IRF730 which works pretty well so far! And doesn’t burn out – it is rated upto 400 V (which far surpasses the 120 V wall voltage in the US).
It works for a light (a resistive load):
and a fan (an inductive load):
Here is the simple dimming code used with the infrared detection sensor. I used a universal sony remote as the transmitter.
PROJECT DEVELOPMENT STUDIO

To do:
1.Transpose important elements from the above “map”
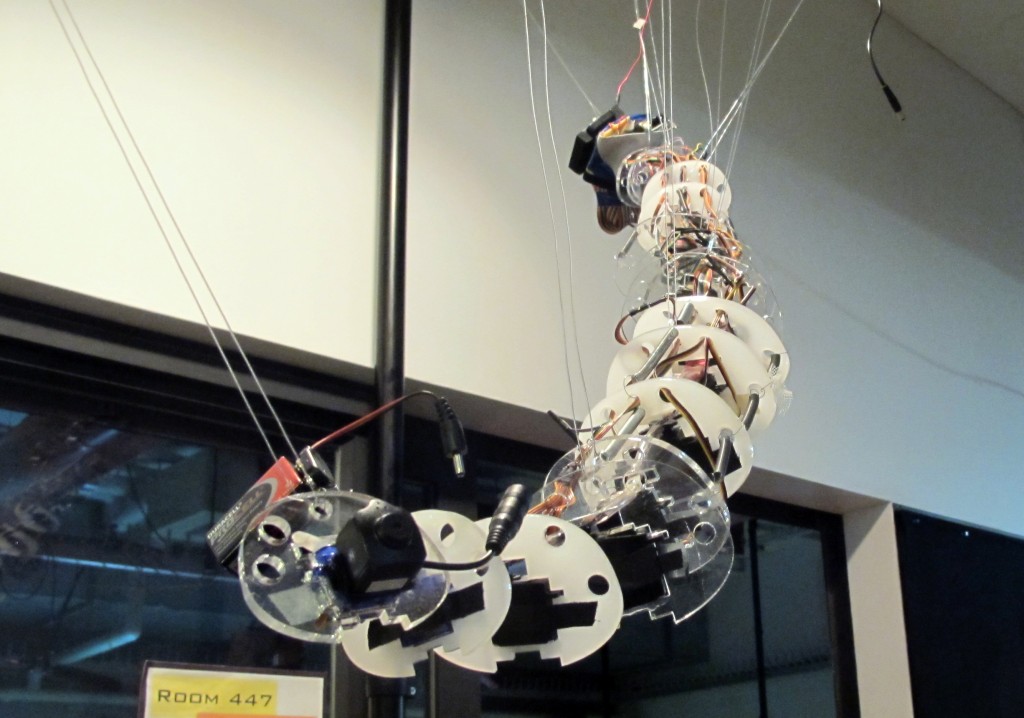
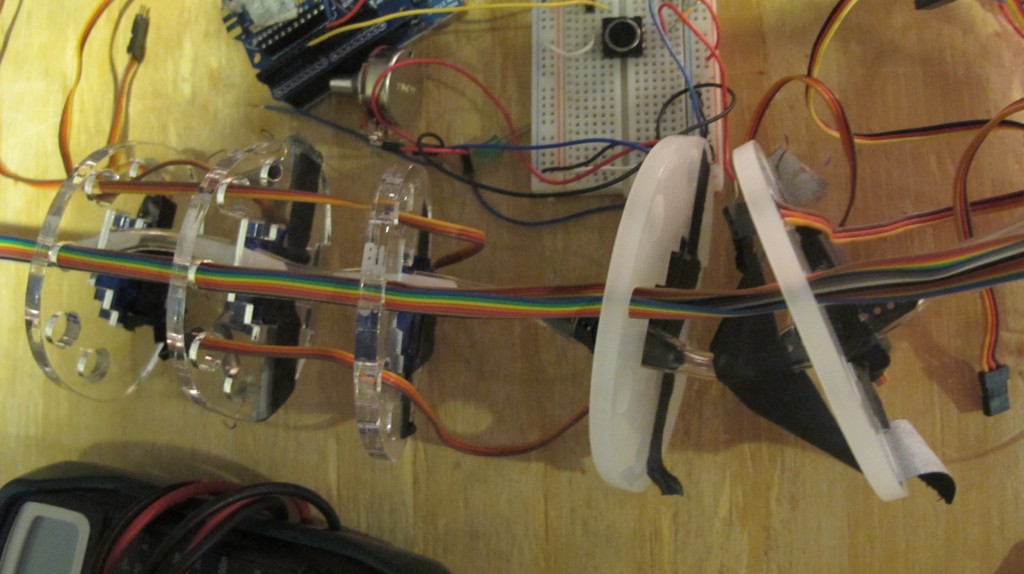
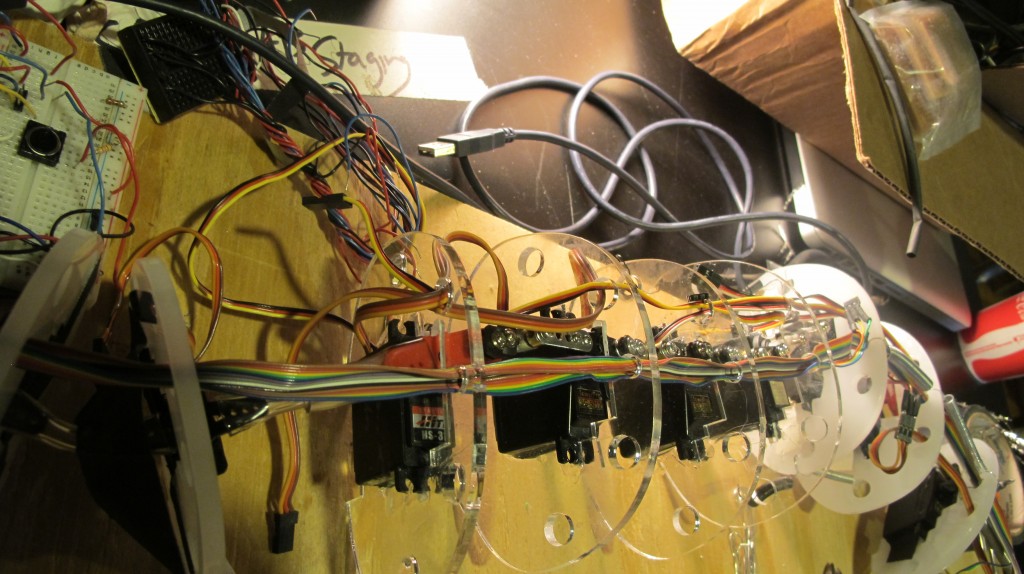
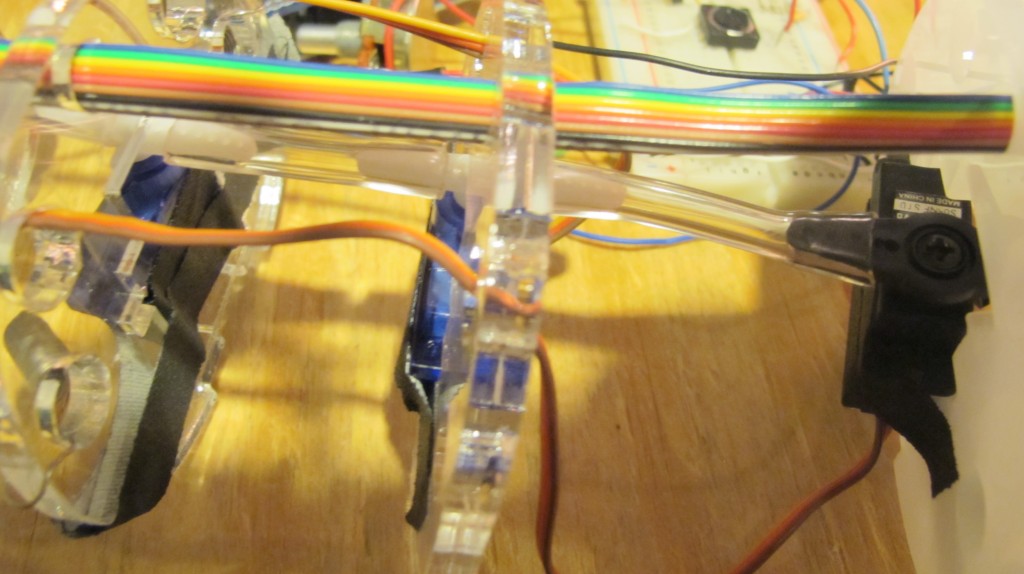
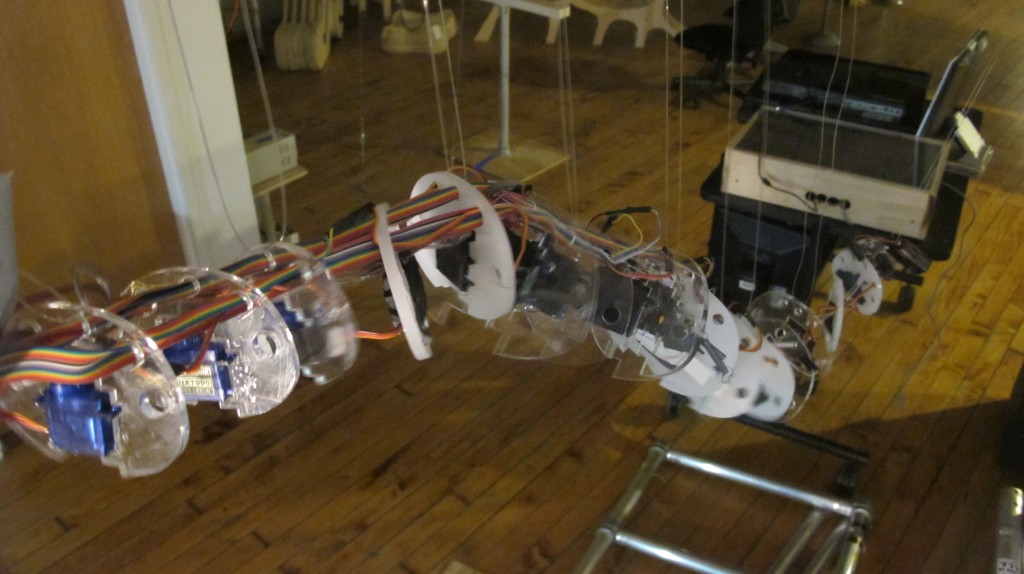
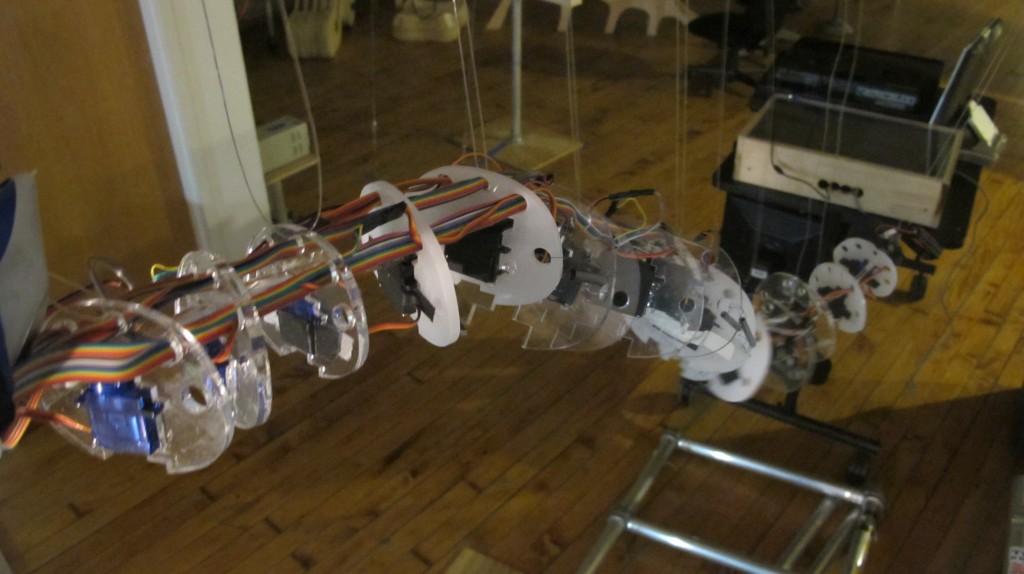
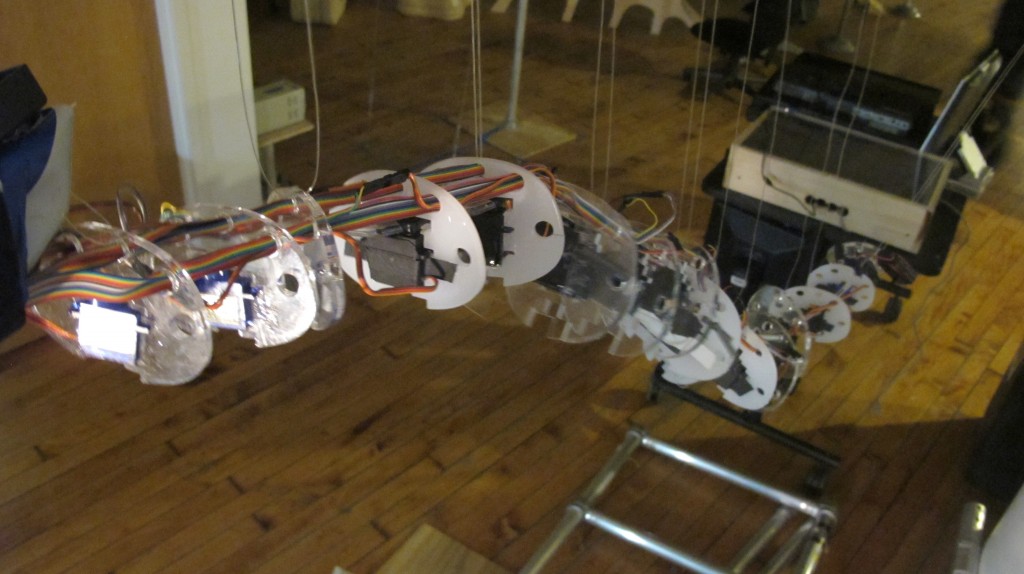
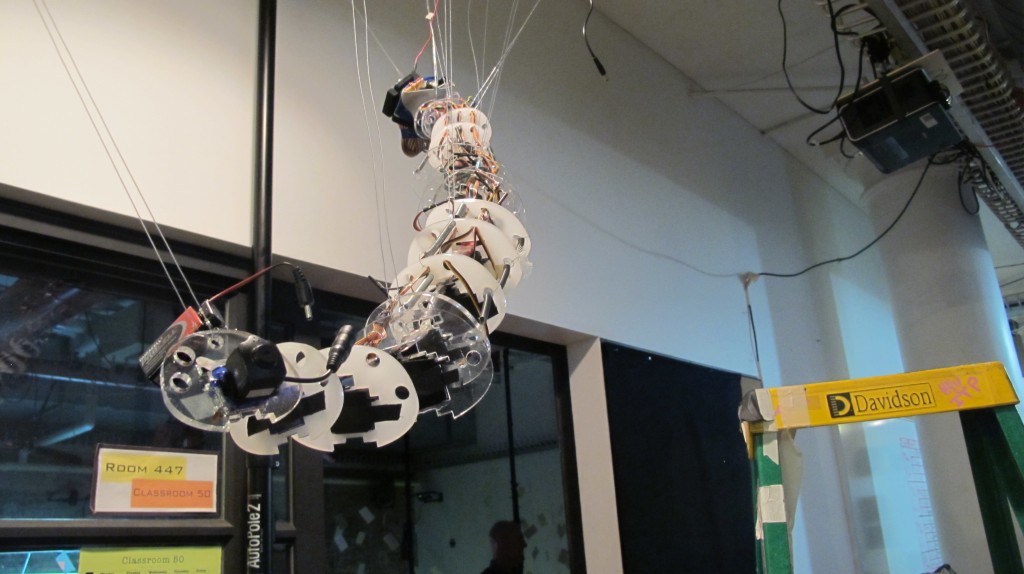
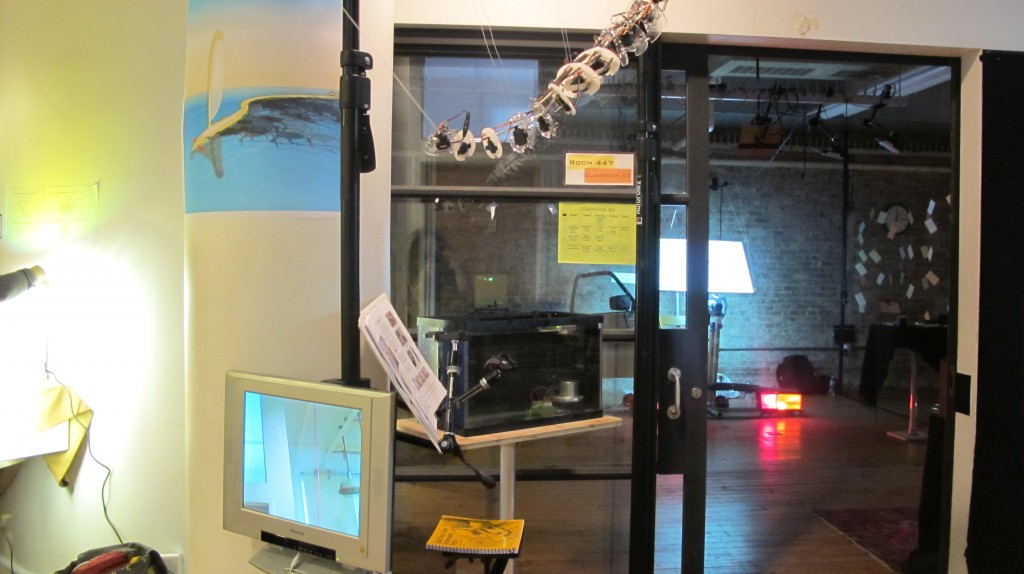
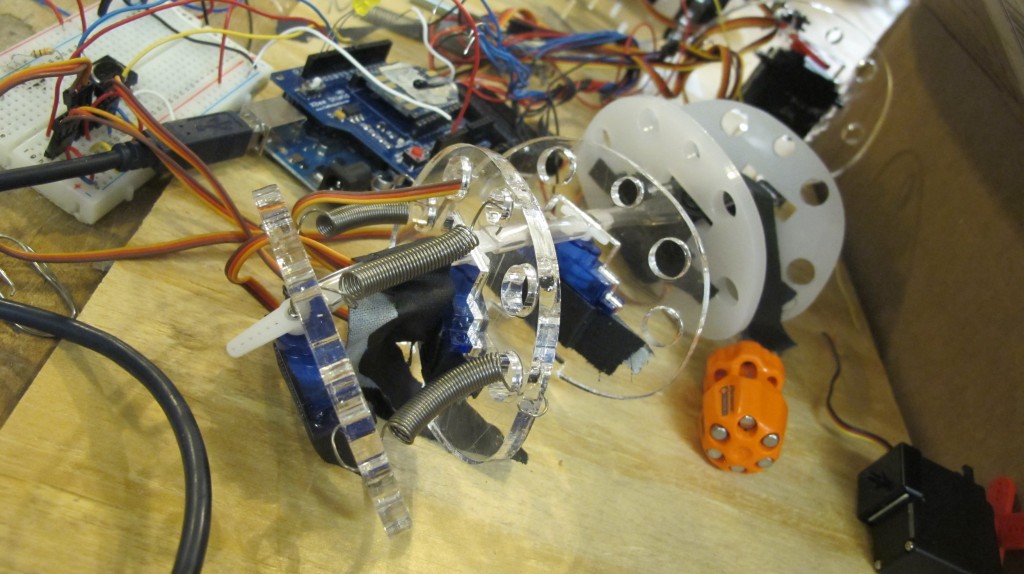
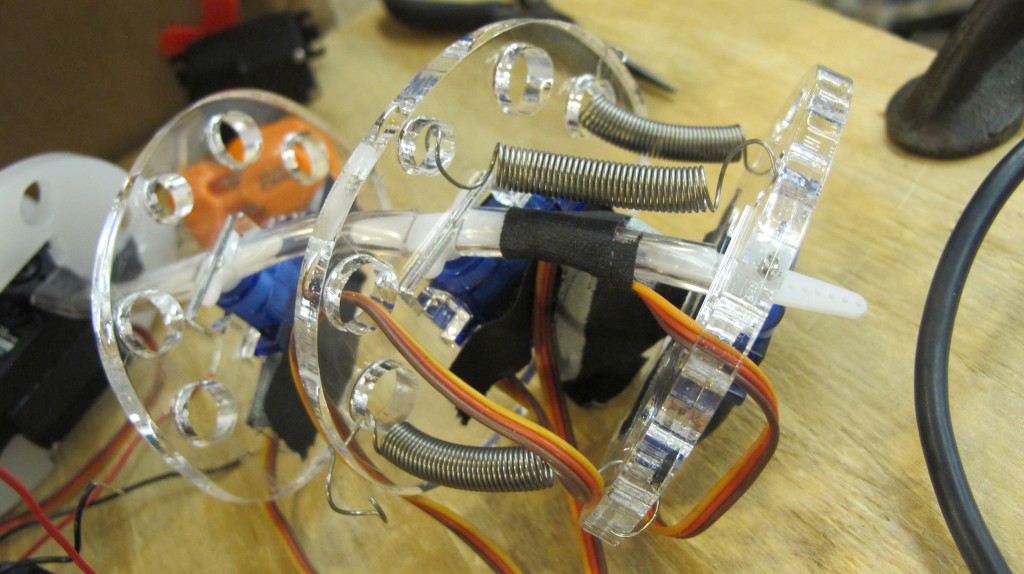
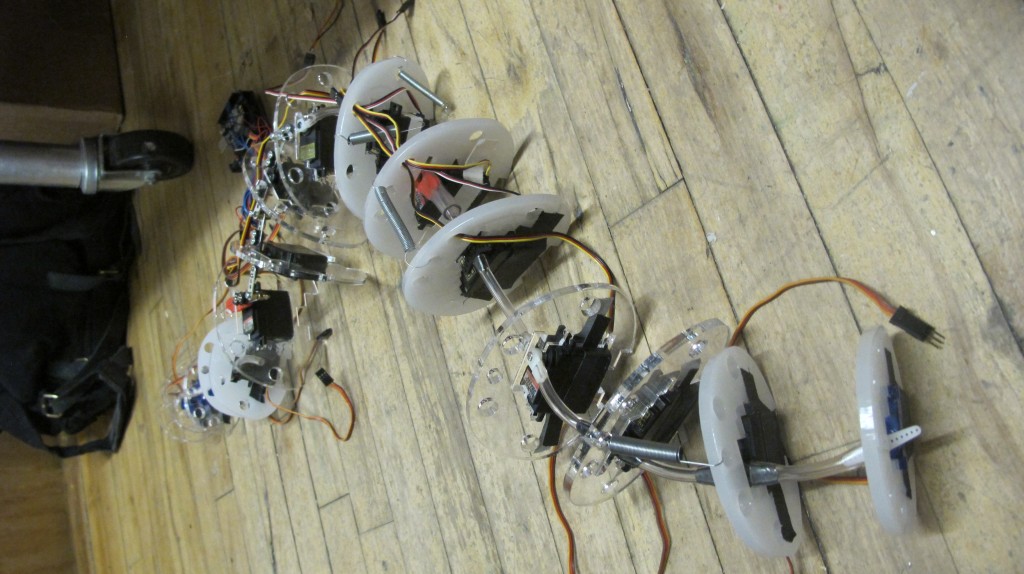
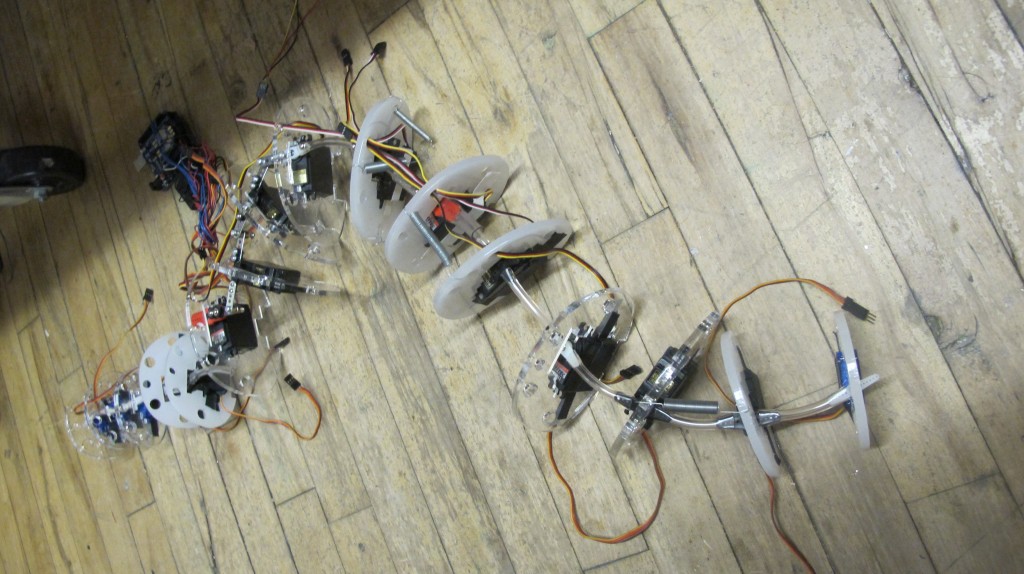
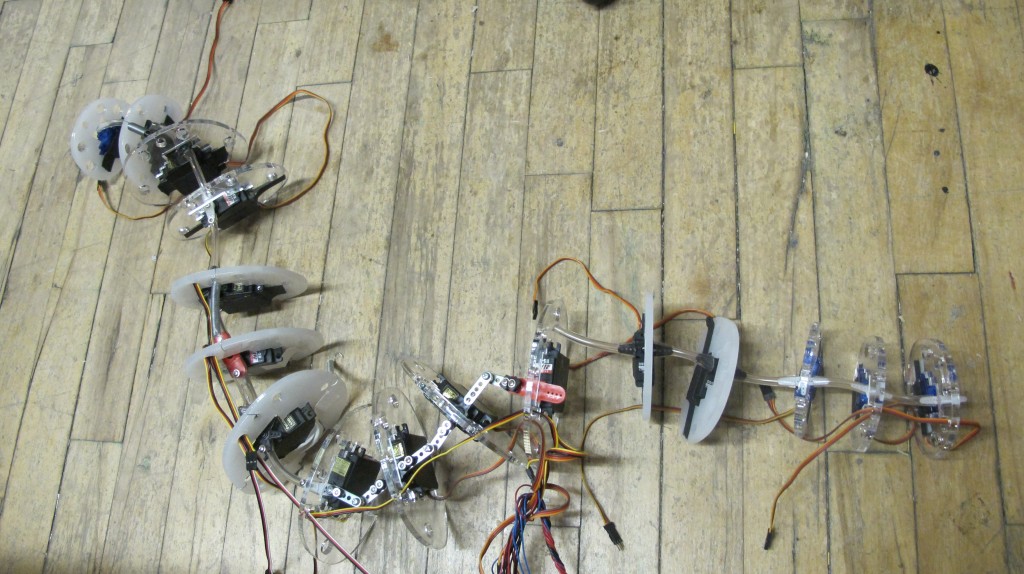
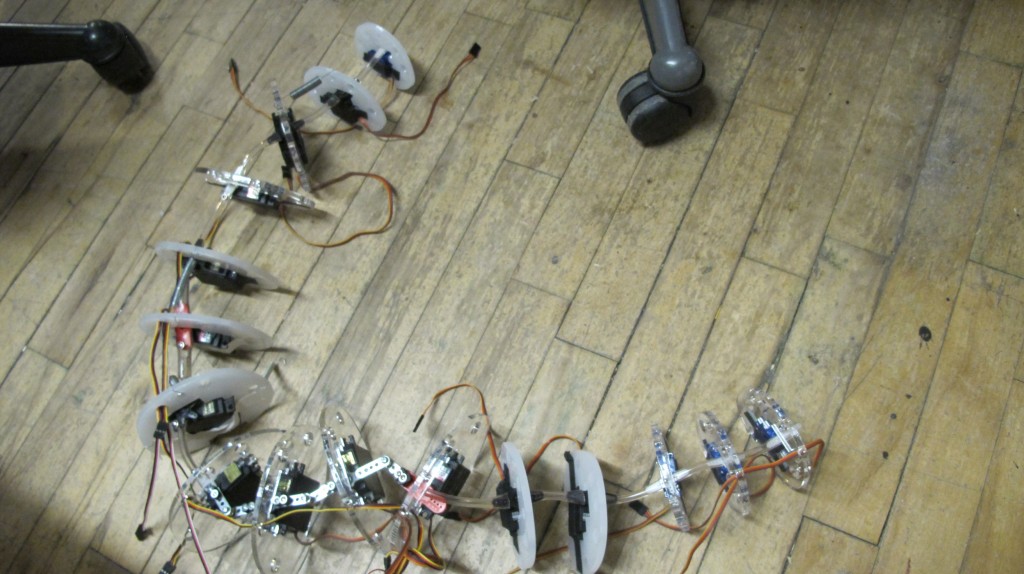
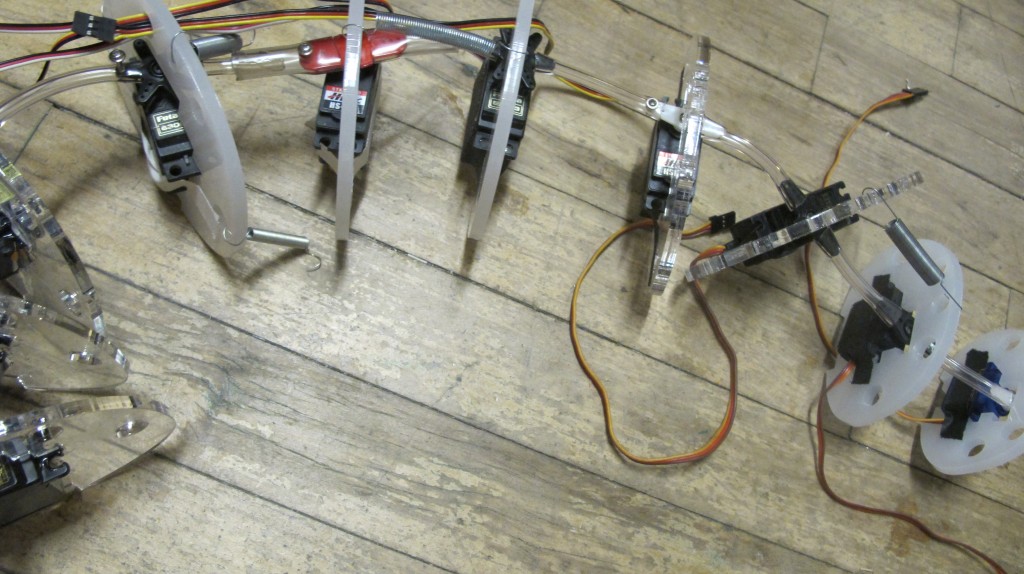
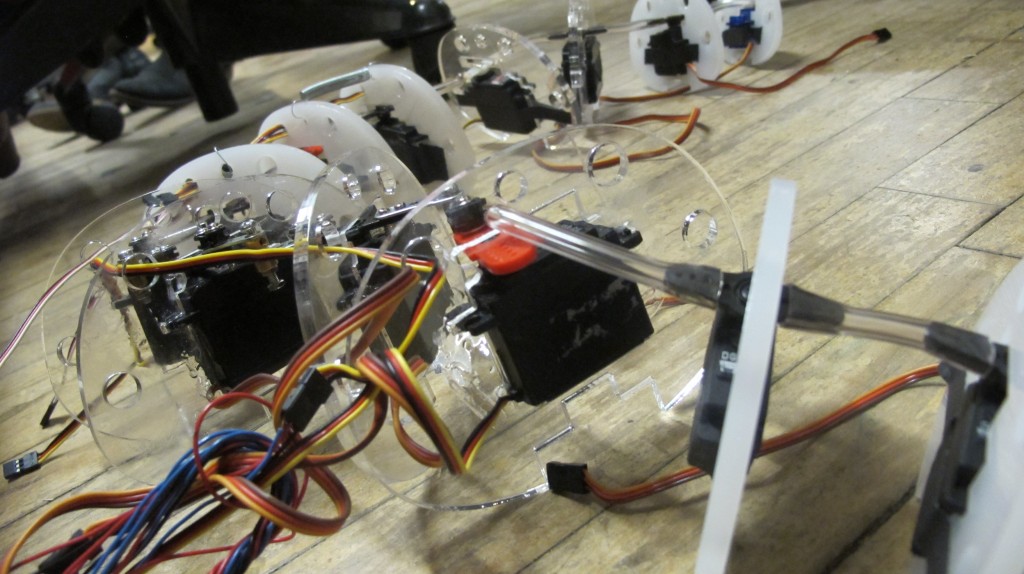
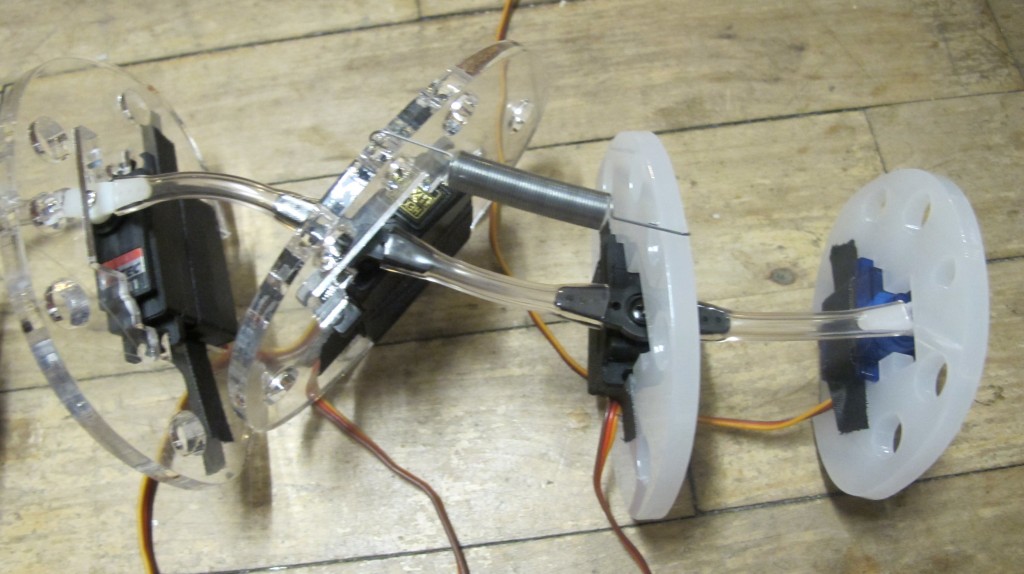
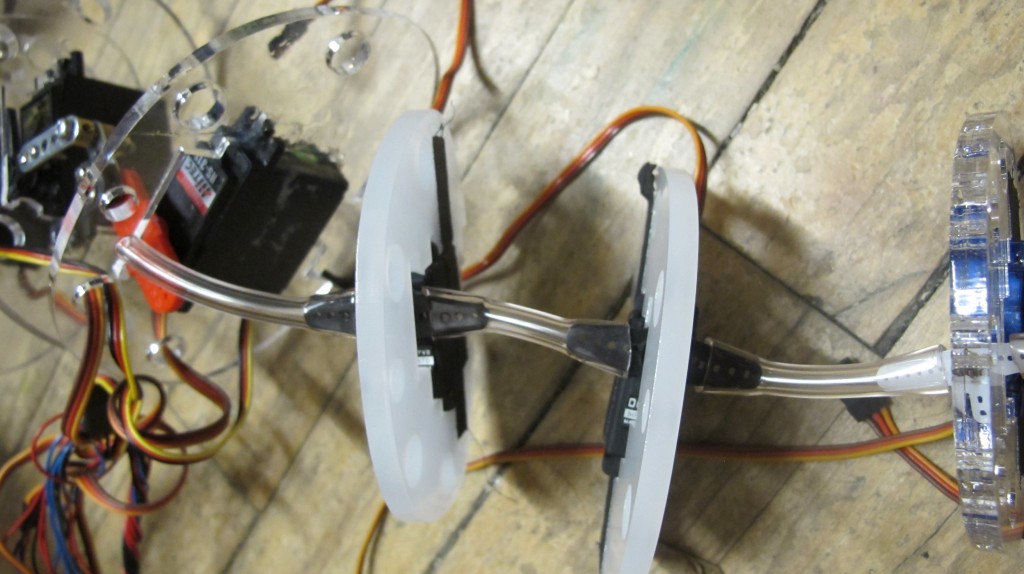
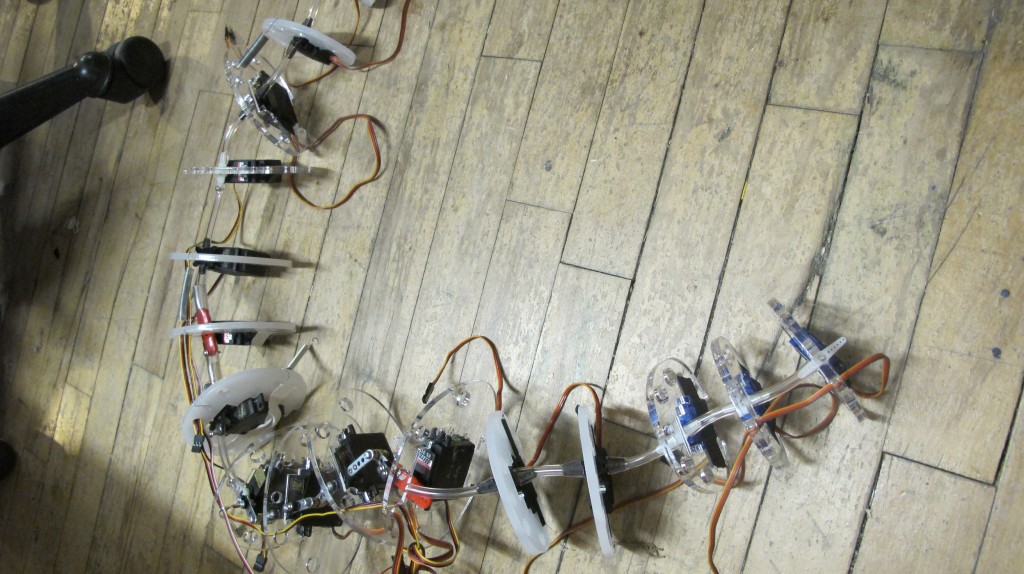
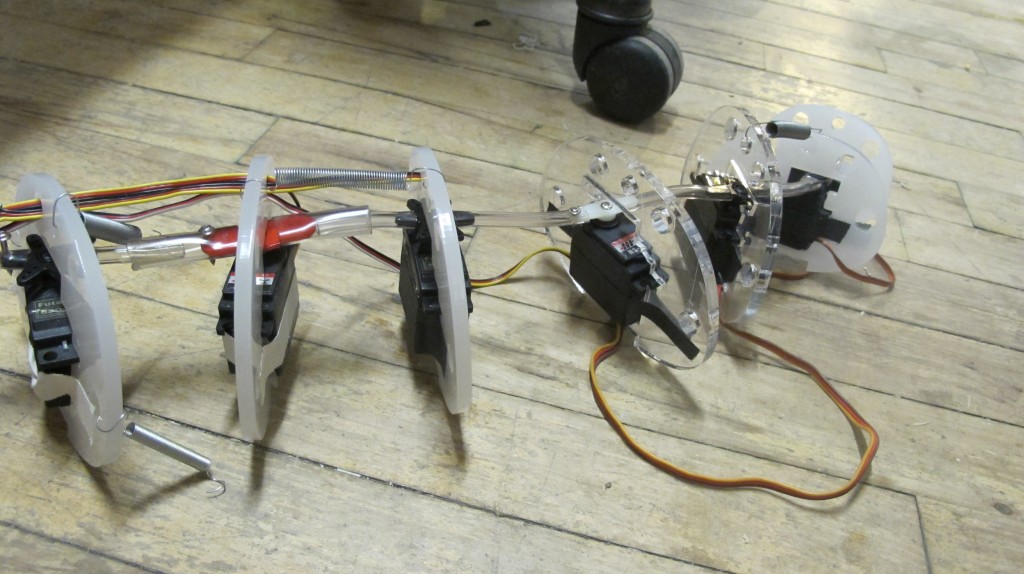
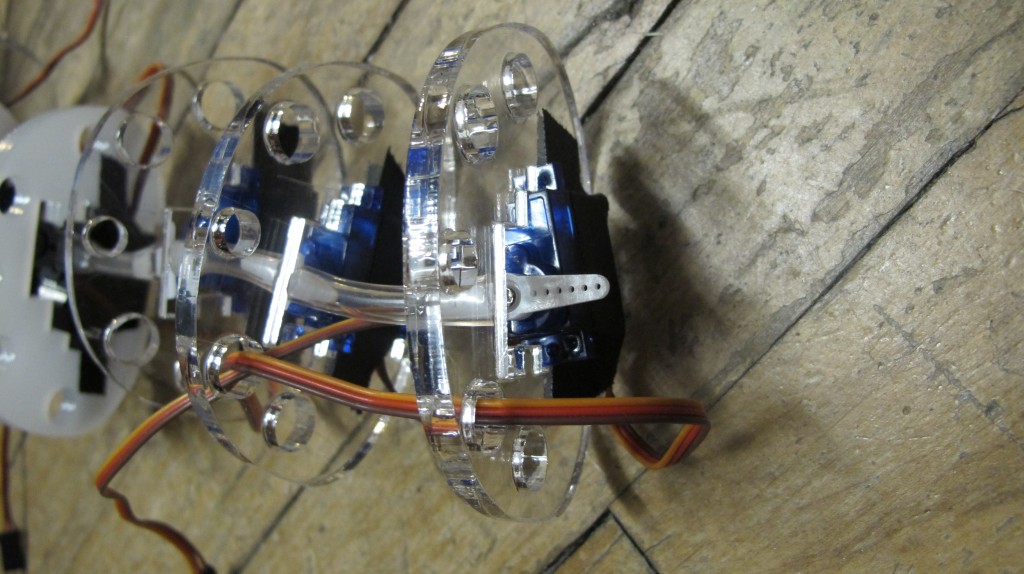
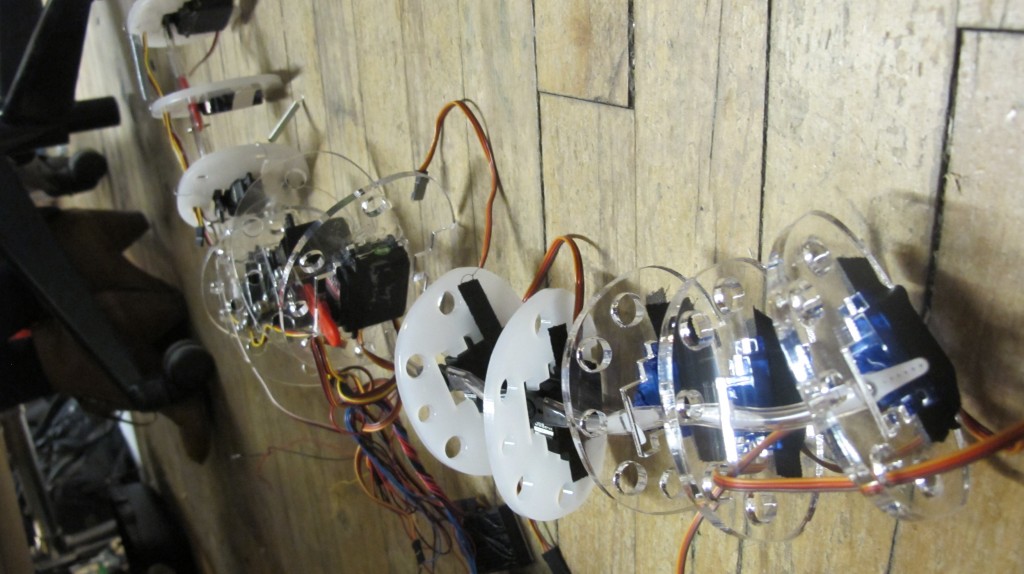
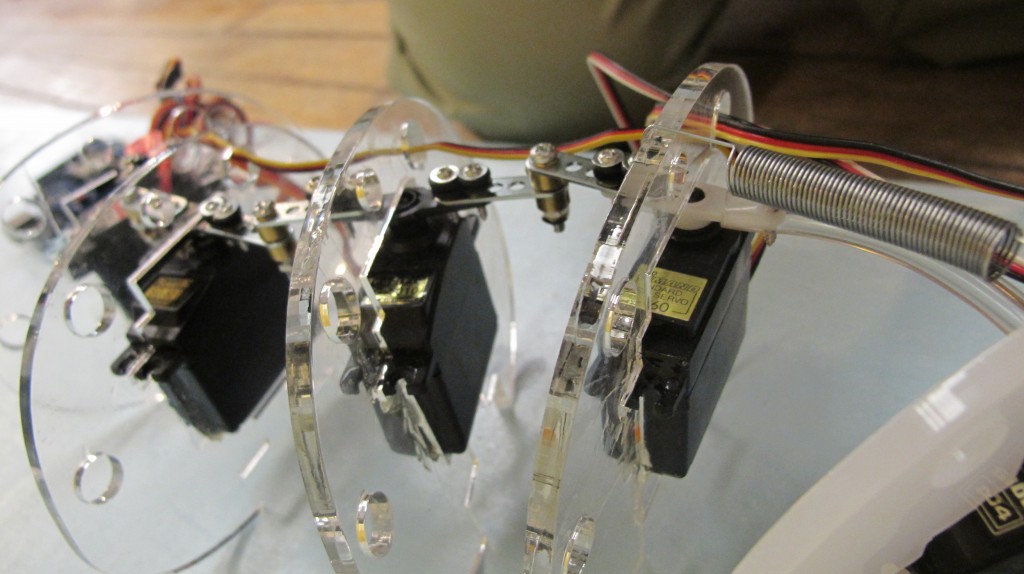
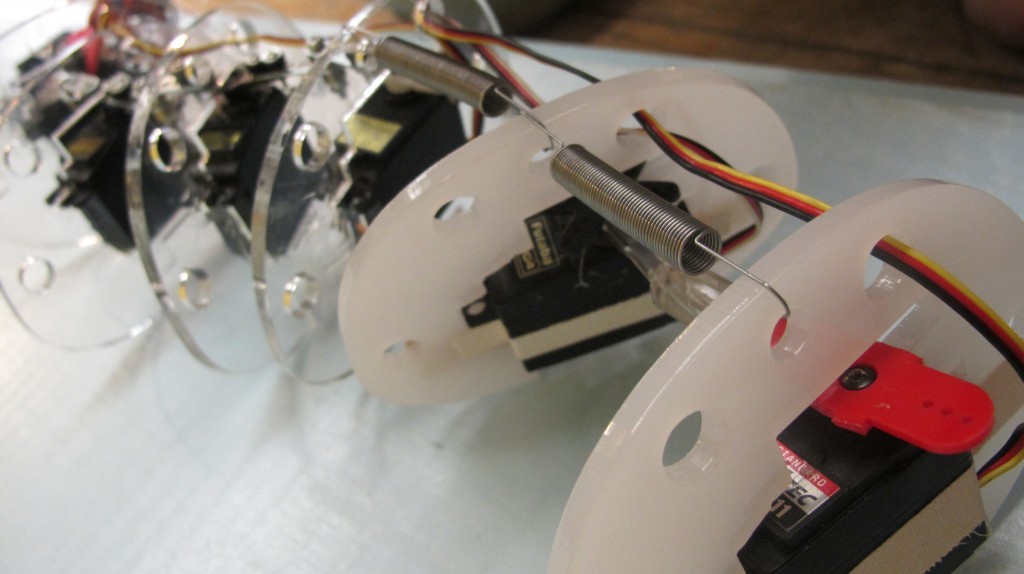
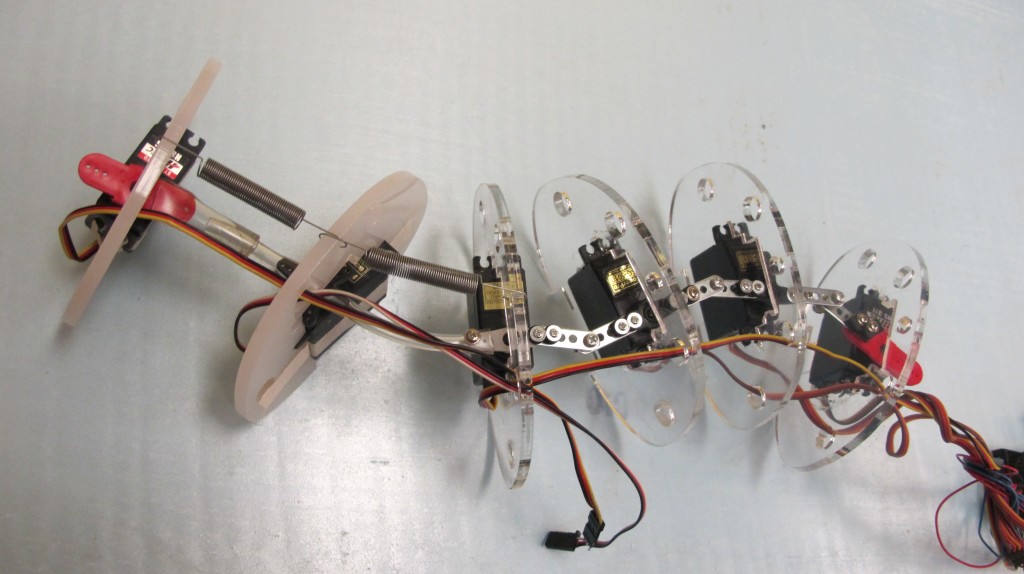
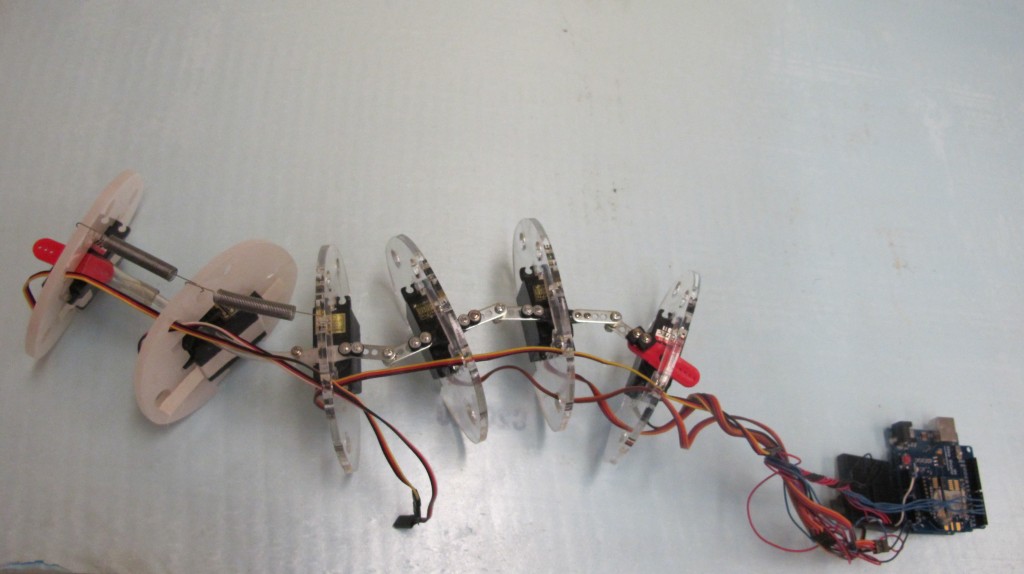
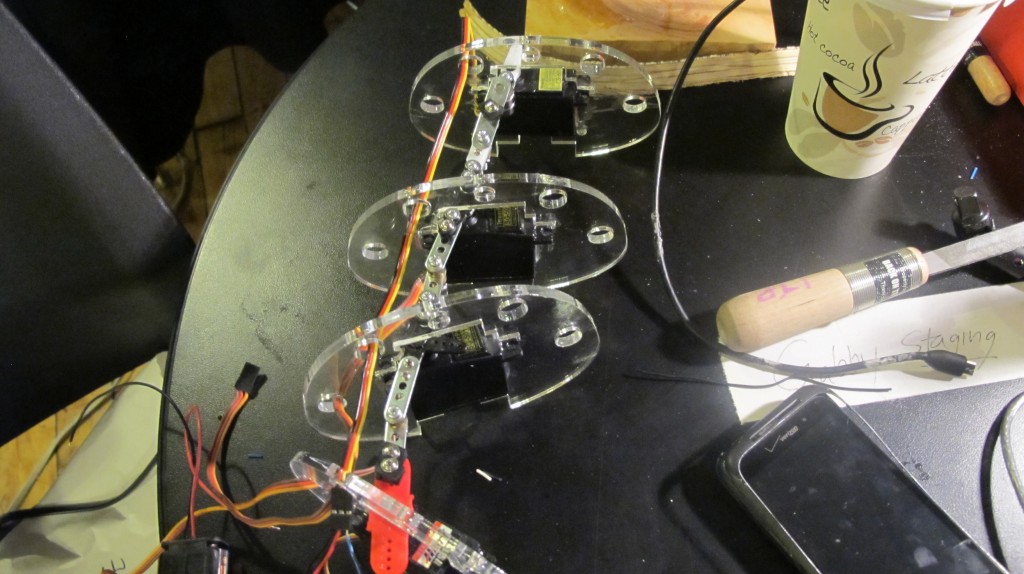
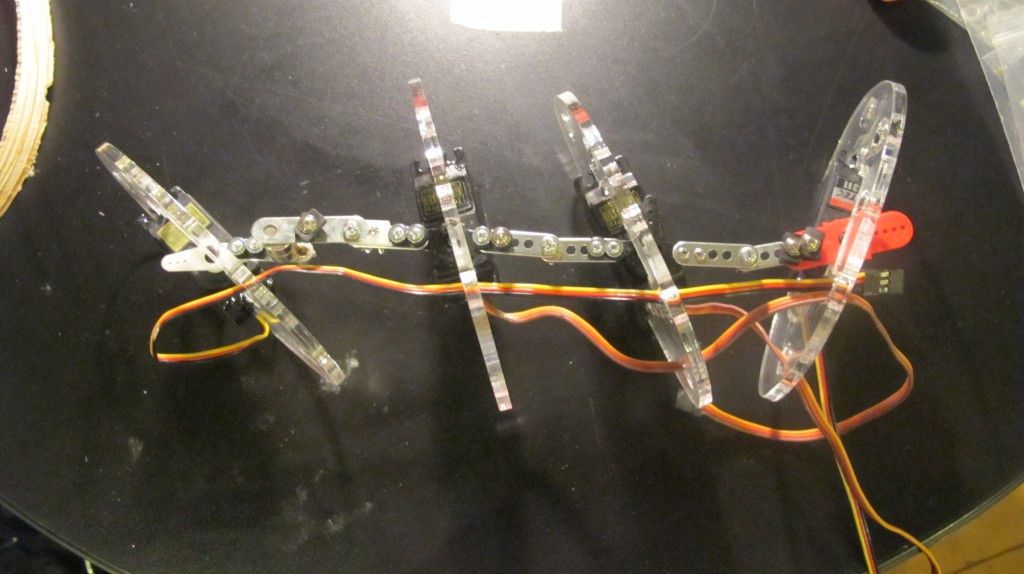
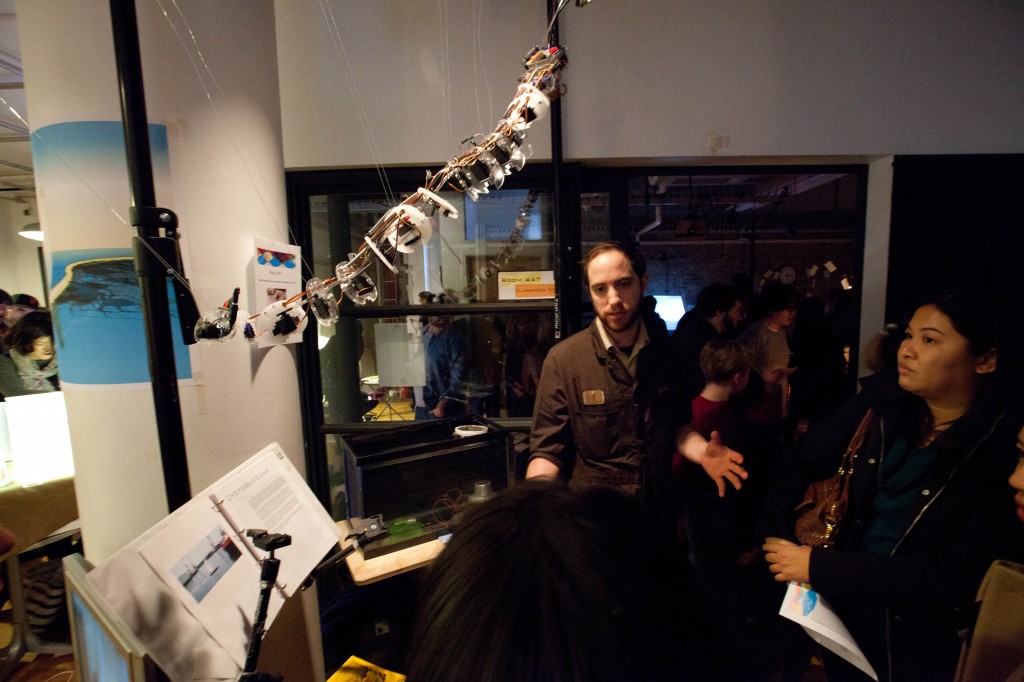
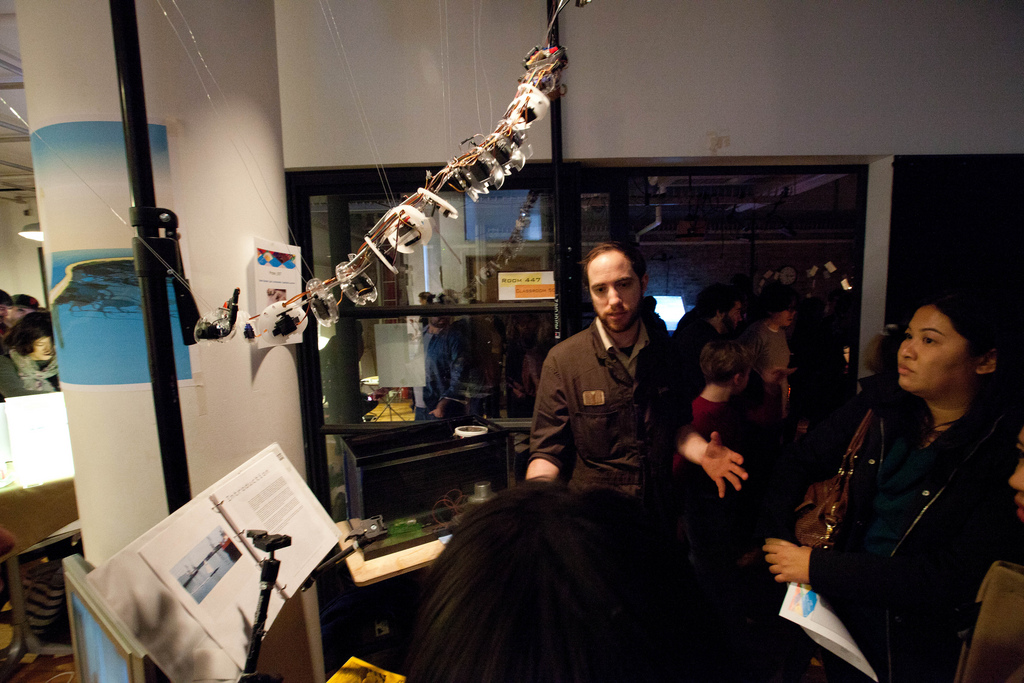
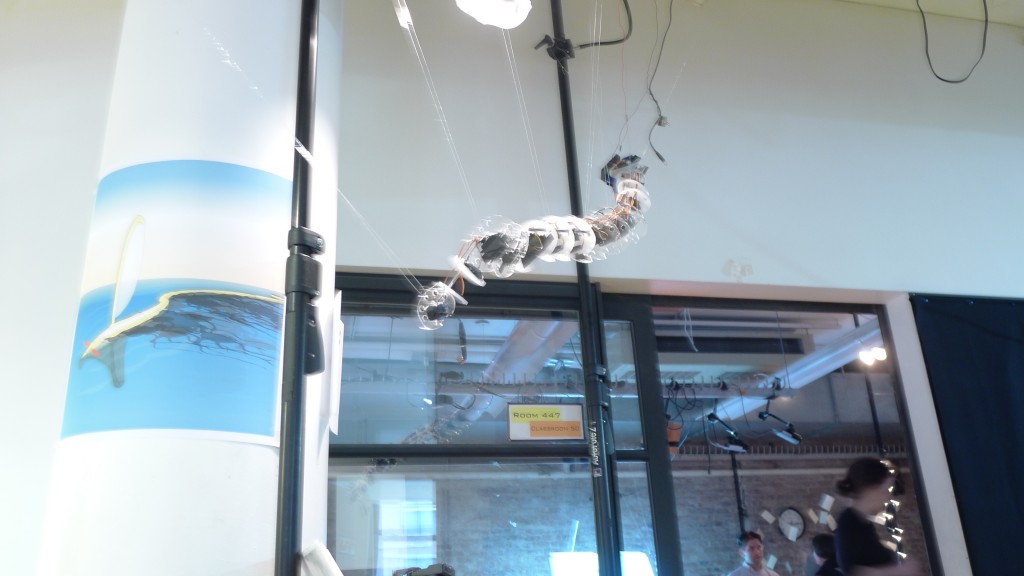
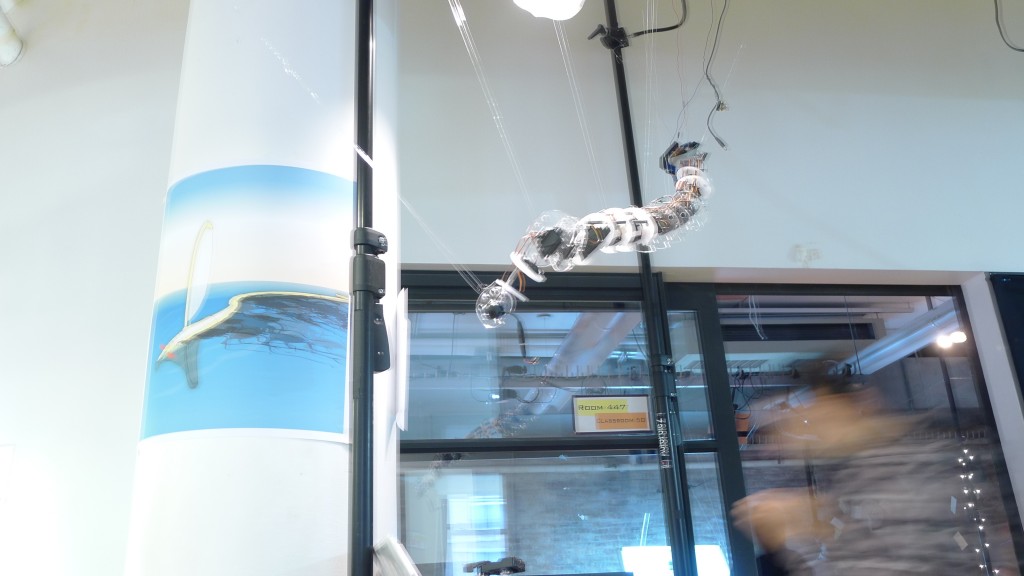
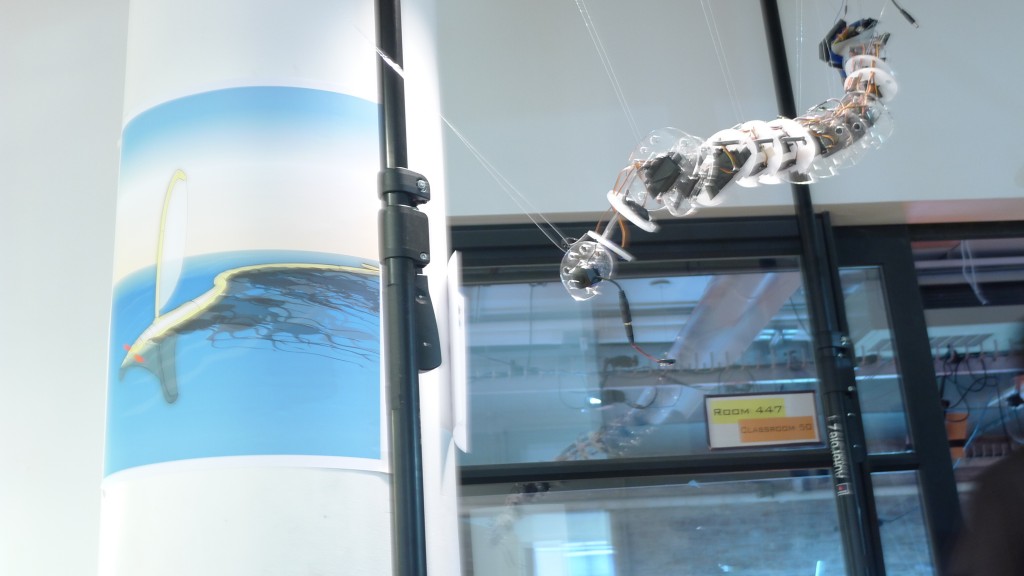
I had a very specific topic of interest I would like to explore – the open source hardware system and agent-based software architecture for a universal-joint system for individual units that self-assemble into a biomimetic linear, snakelike robot that is adaptable for different purposes and functions.
However, I would like to instead build a large scale (2 meter?) vertebrate like robot in a finished form. This will be an aesthetic design that stems out of the idea and project, Protei, that I am working on, which is an open source prototype for a fleet of semi-autonomous or remote controlled, segmented, shape shifting, oil-collecting sailboat drone. I would like to create both DIY kits for a fully segmented and articulated robotic snake, with a software package, mechanical designs, and electronic architecture, for a smaller simpler version of this boat, but focus on the large scale model and the concept of biomimicry in science and art.
I believe I have to hone in on the unification of the above utilitarian function and inspiration, while also developing the concept of giving life and autonomy to a machine (that can therefore possess its own life cycle), the transformation of human body/mind by modern technology, beauty in the grotesque, the commodification of technology and body…
So… how can I move forwards and converge all of the above (how can I justify making an “aesthetic object”, with the function only as a prompting driving impulse)
2. 3 developments:
1. Bill of materials; Finish instructables for the DIY kit (as an example):
2. write – a description of moving forwards
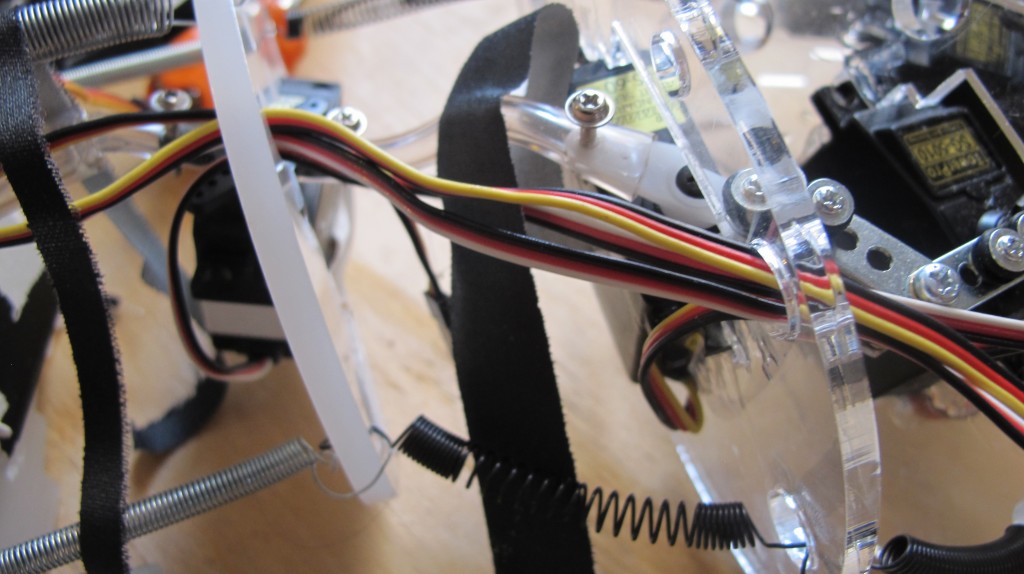
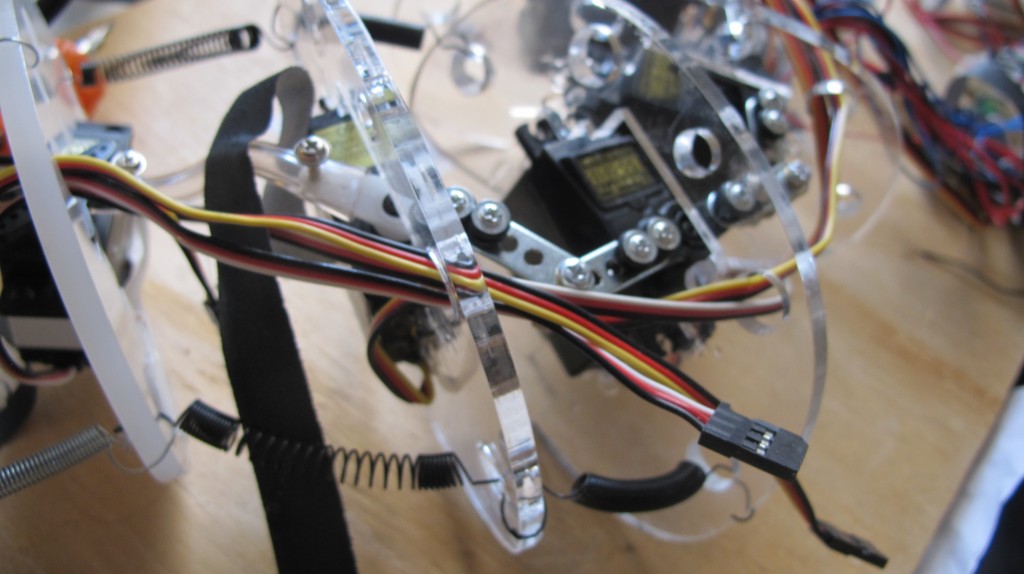
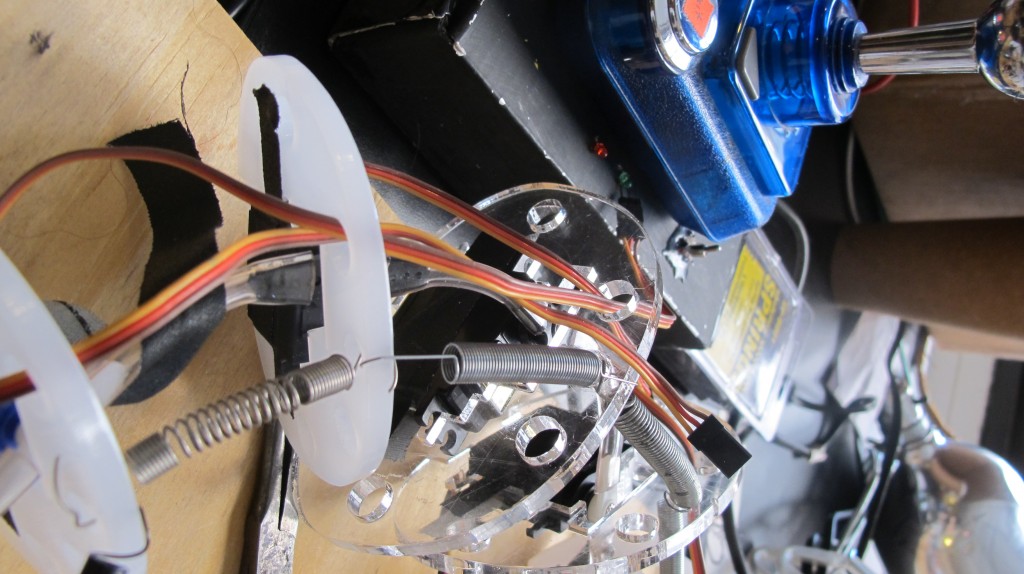
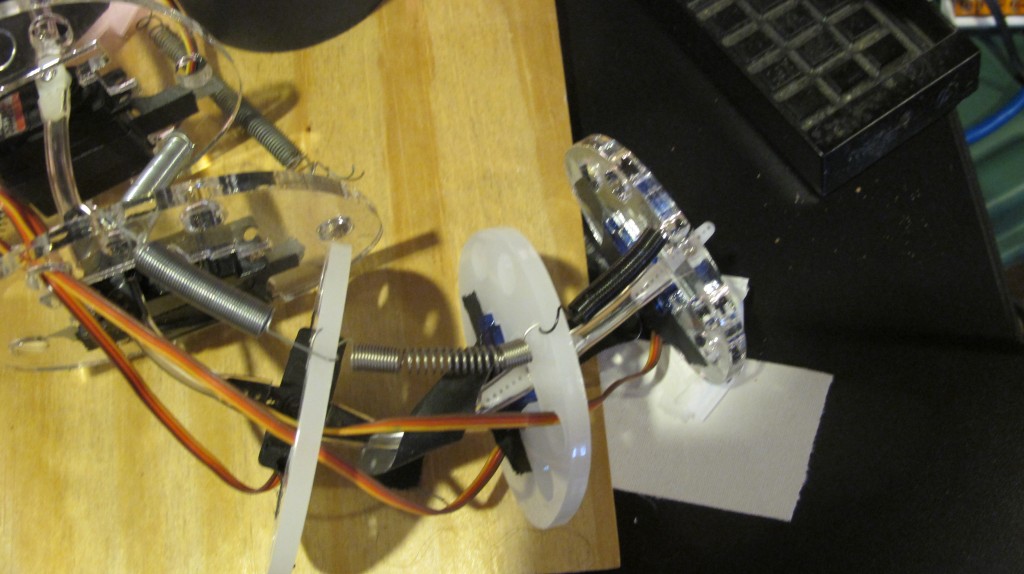
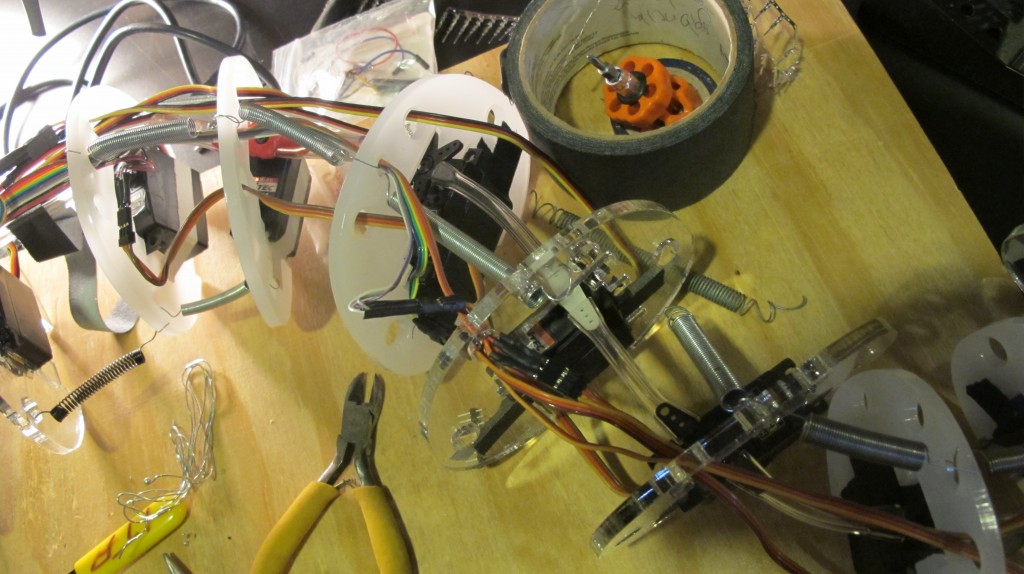
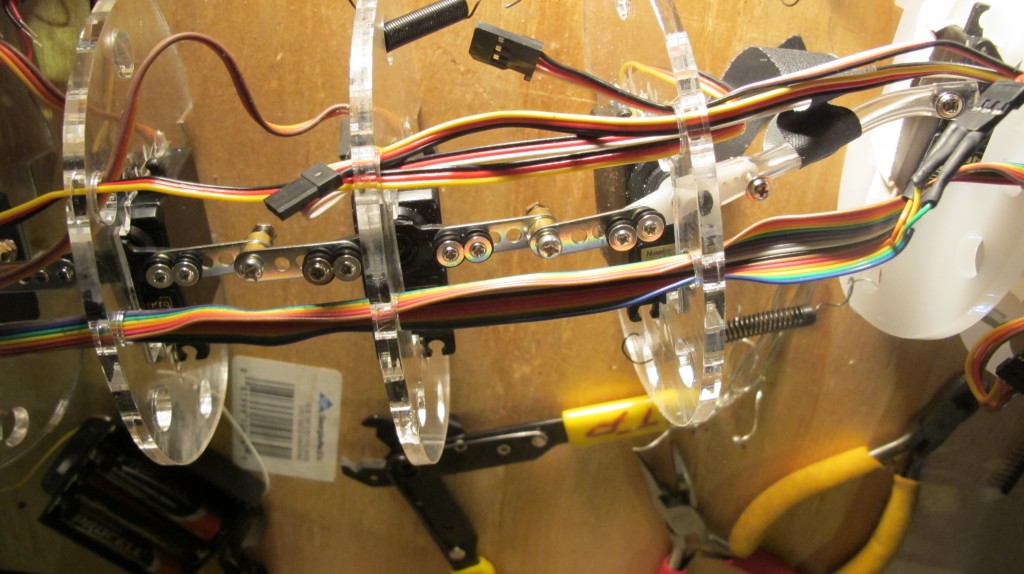
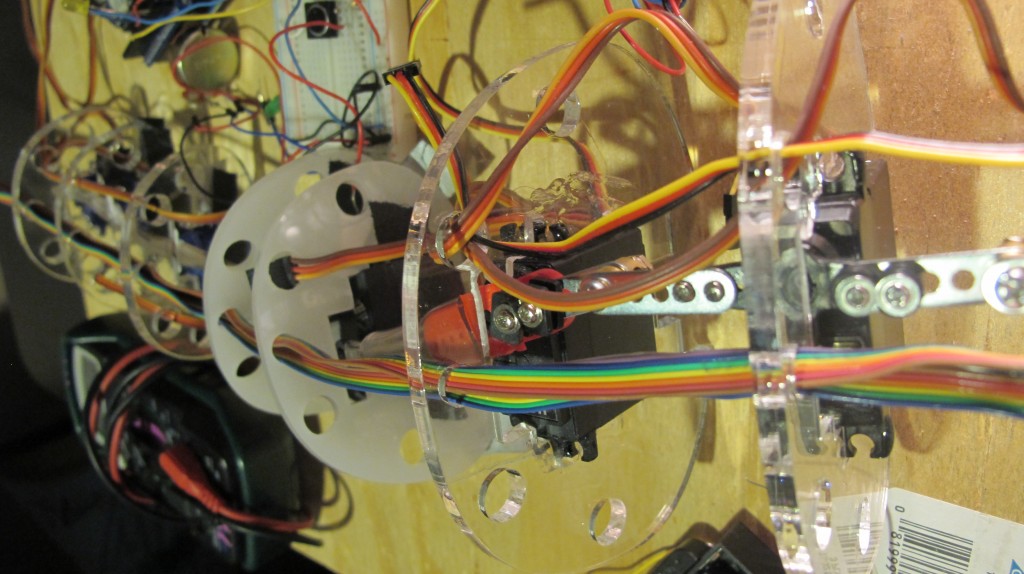
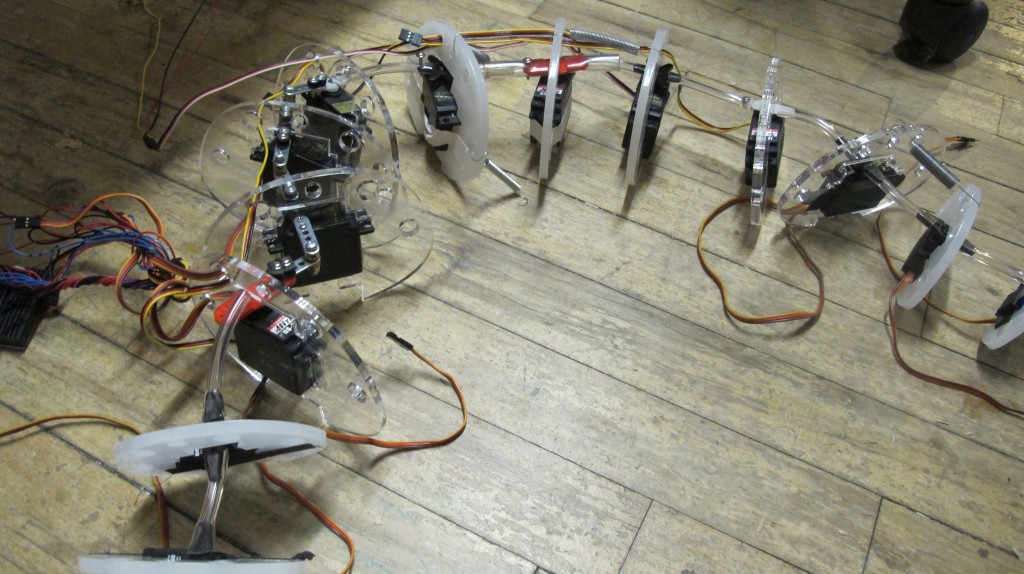
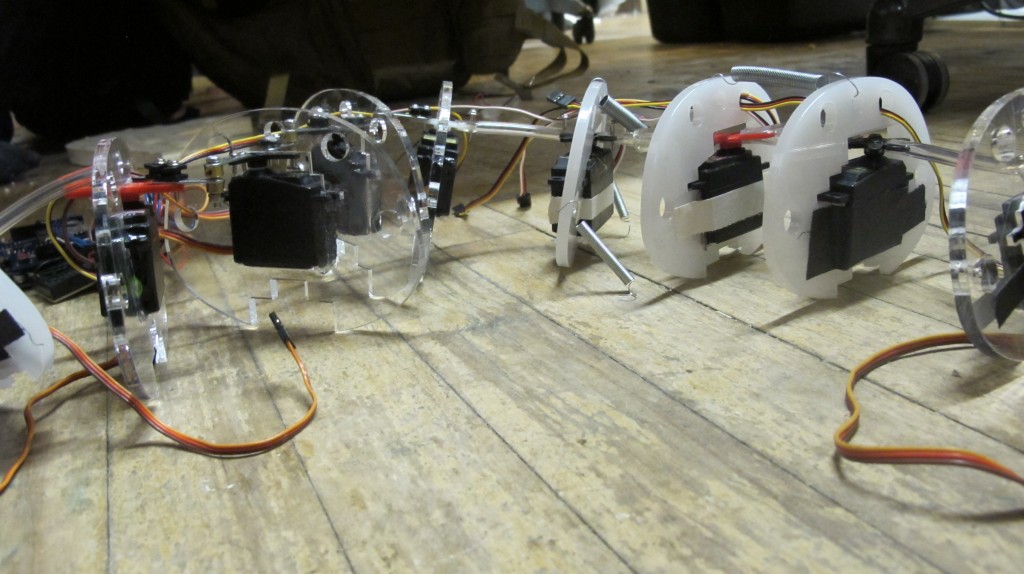
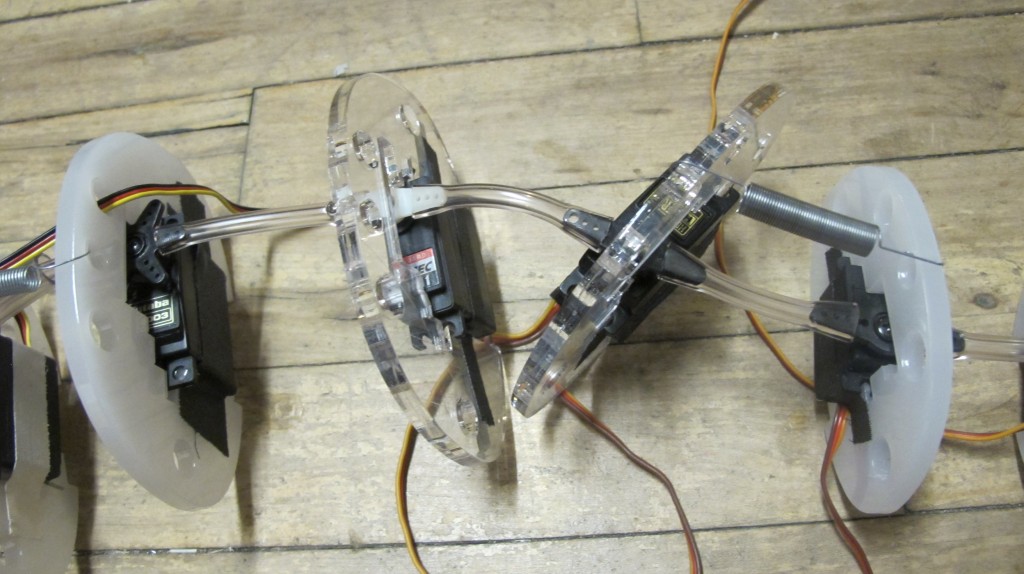
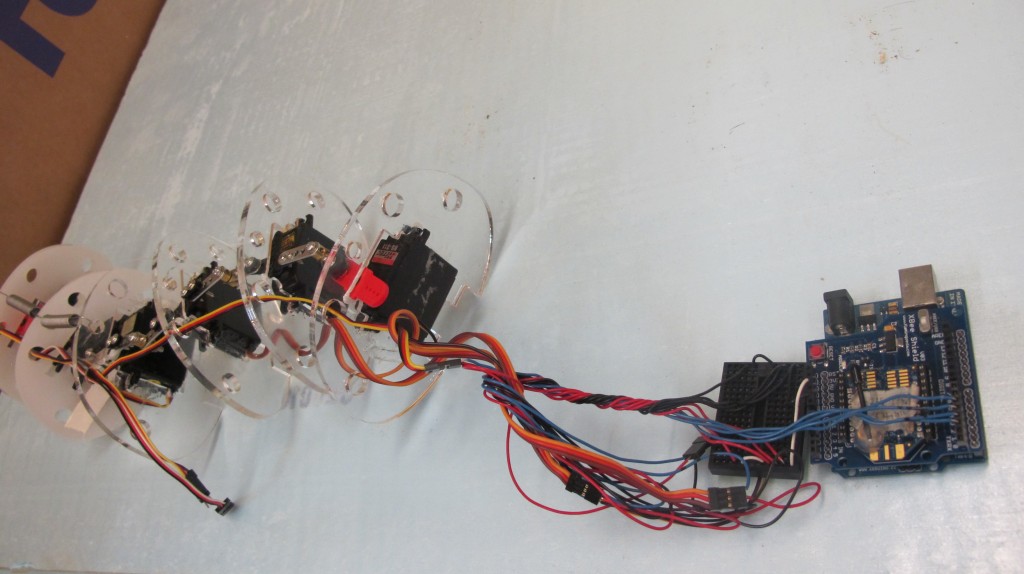
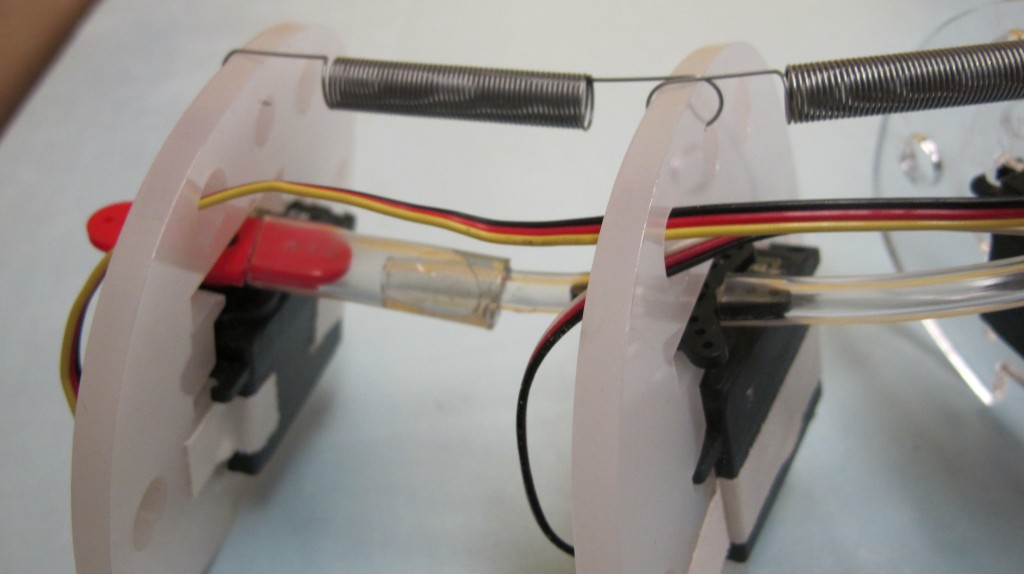
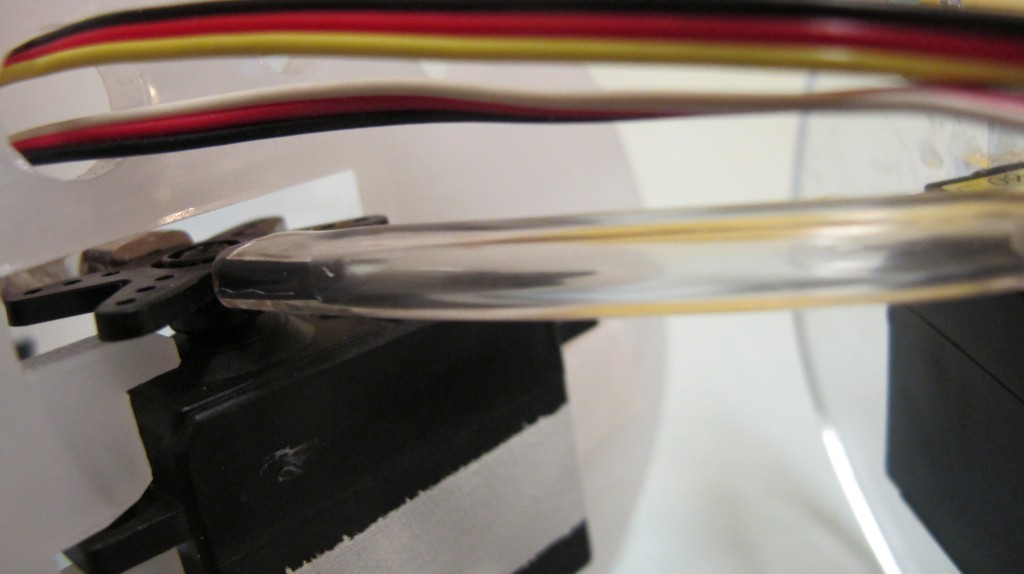
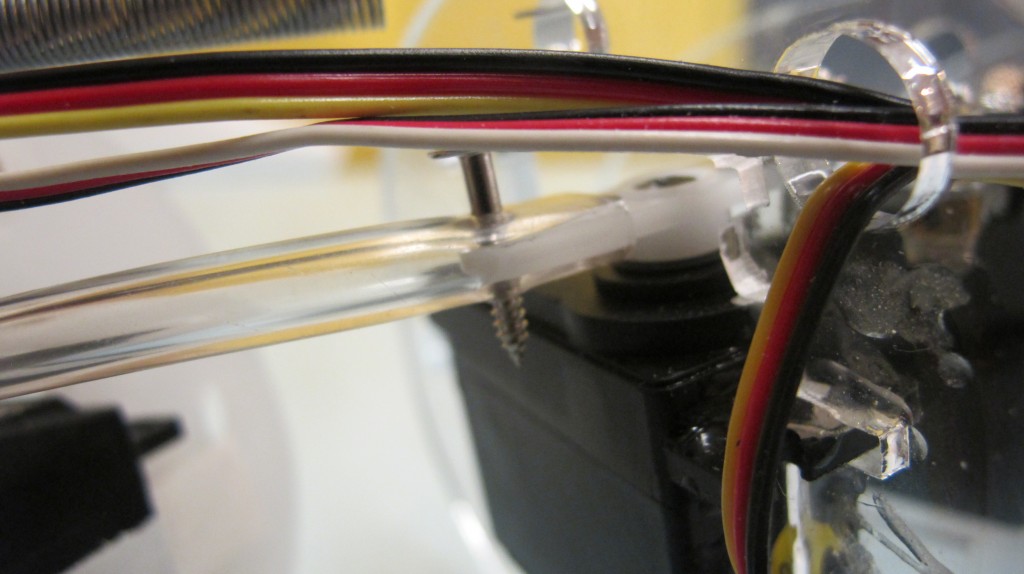
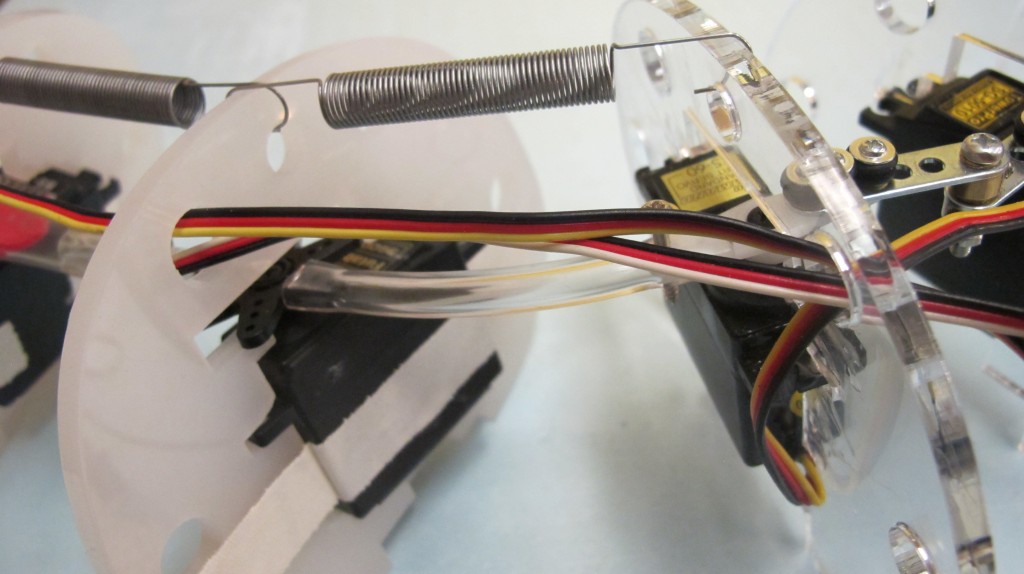
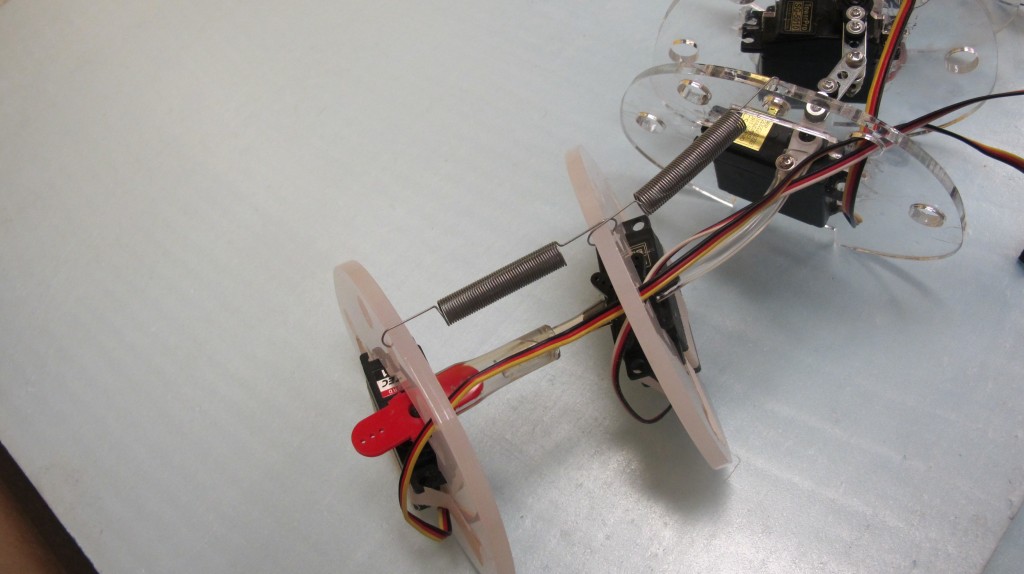
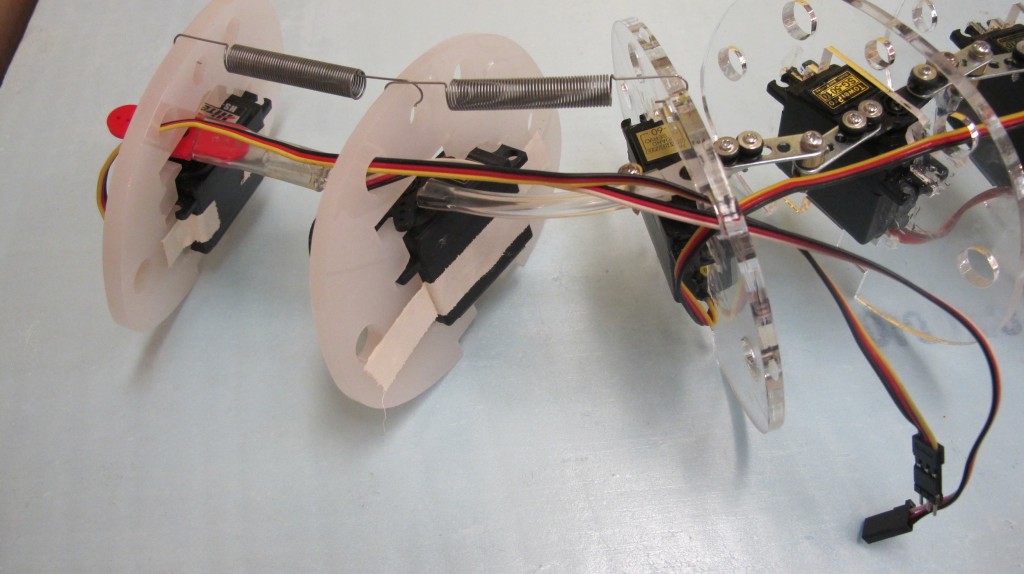
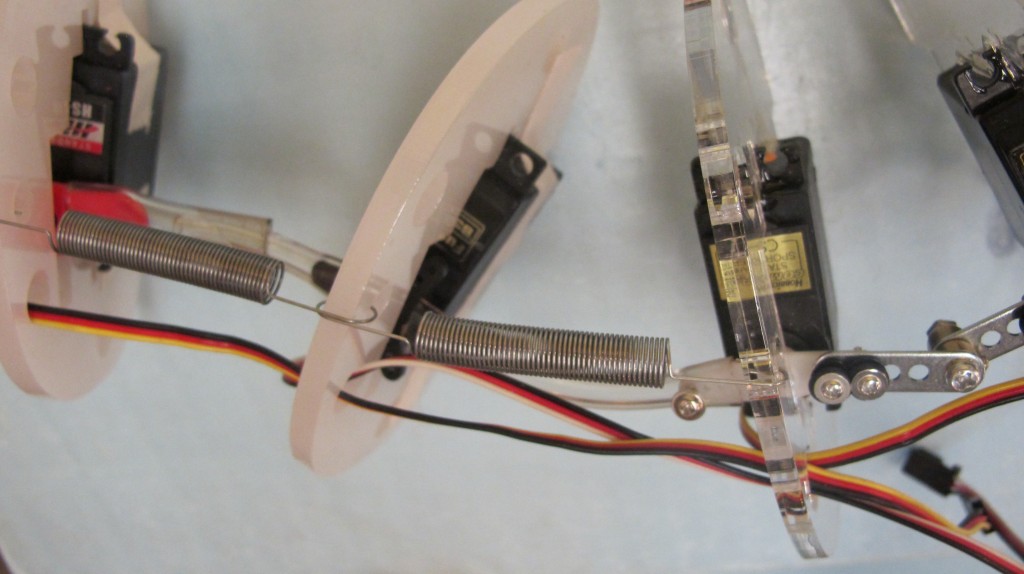
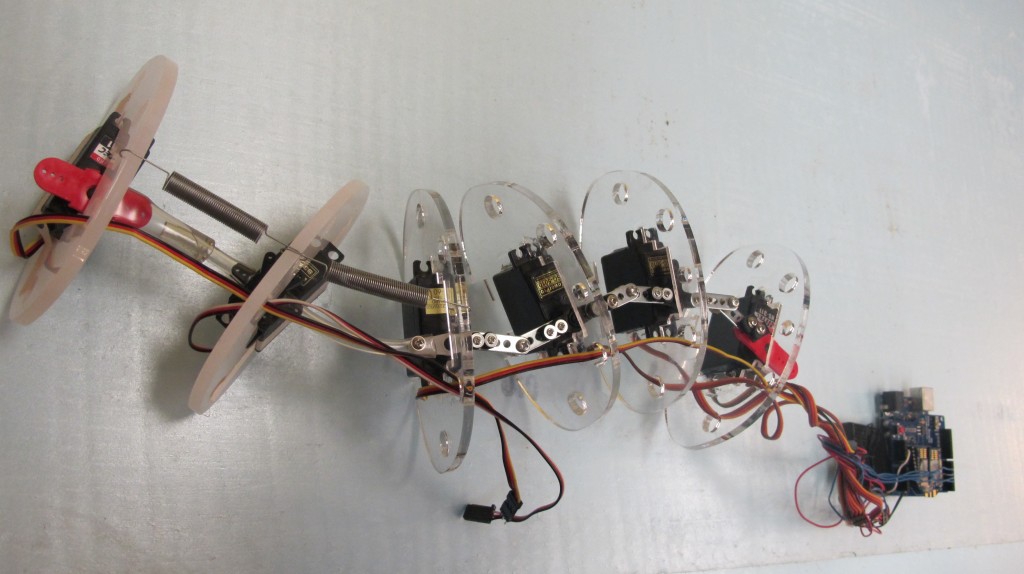
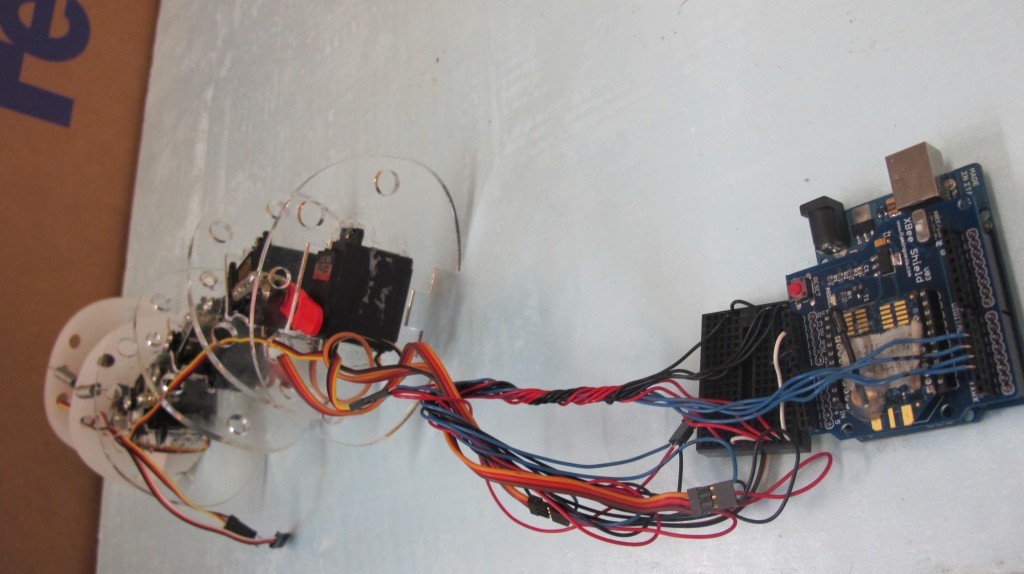
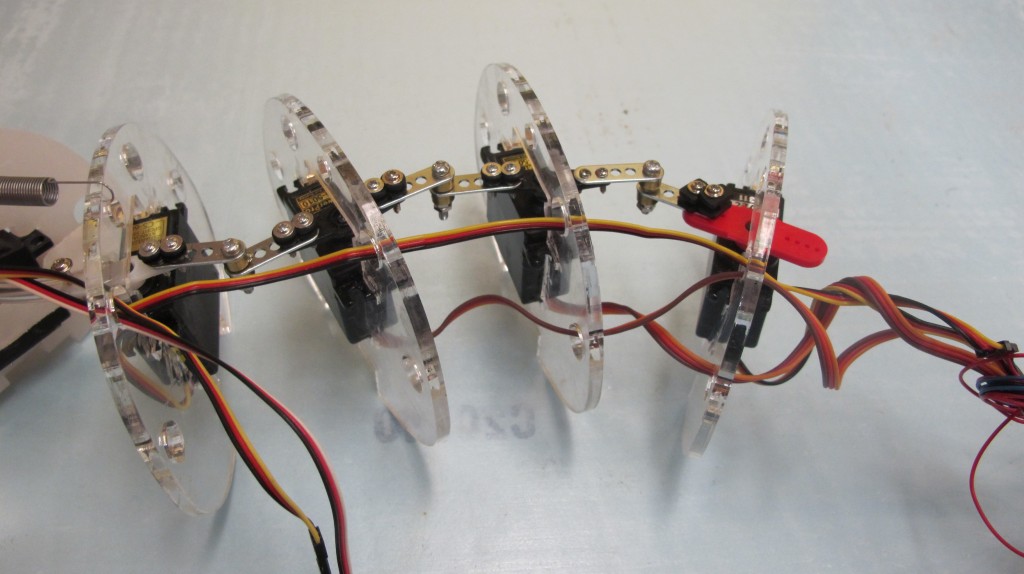
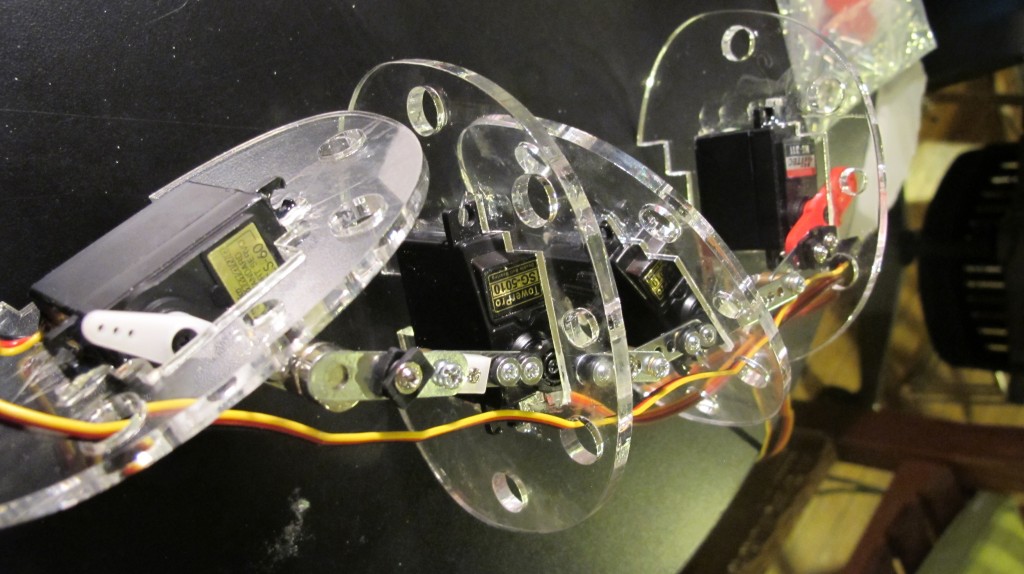
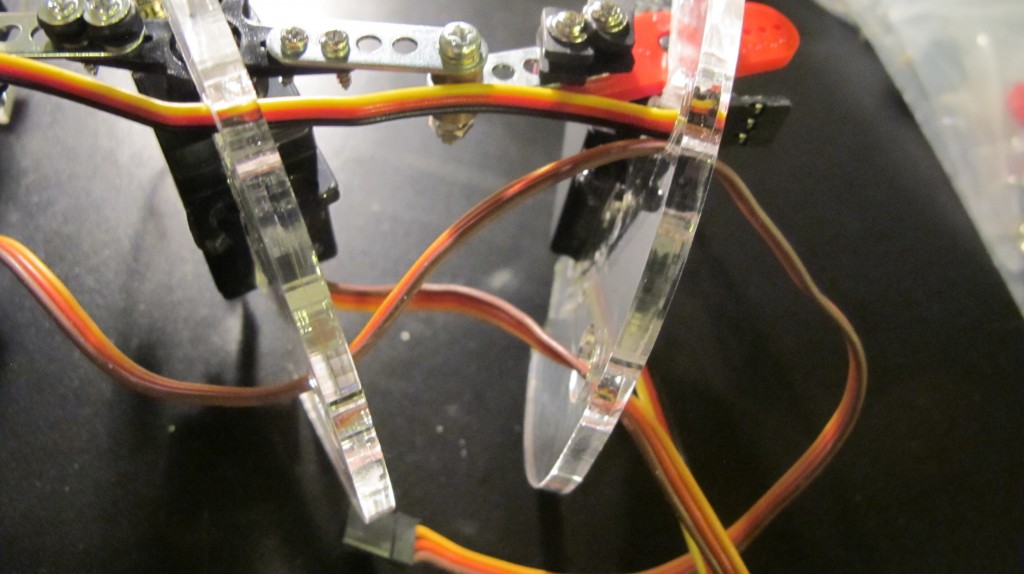
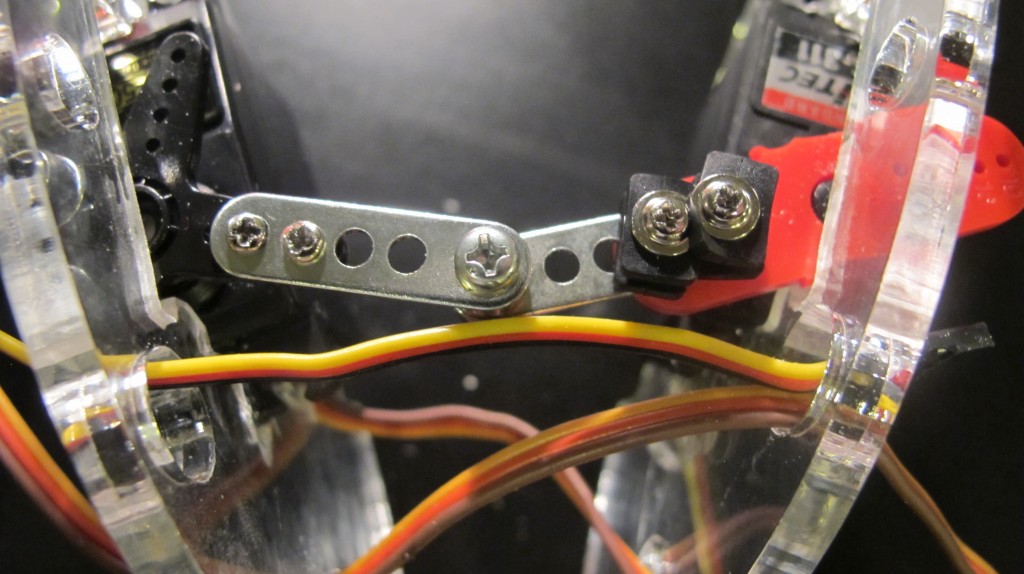
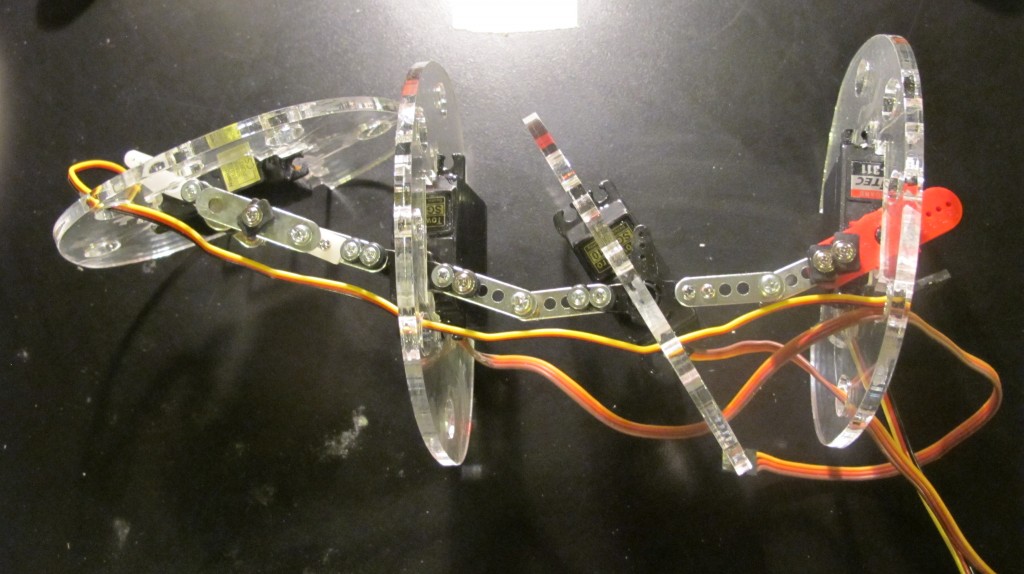
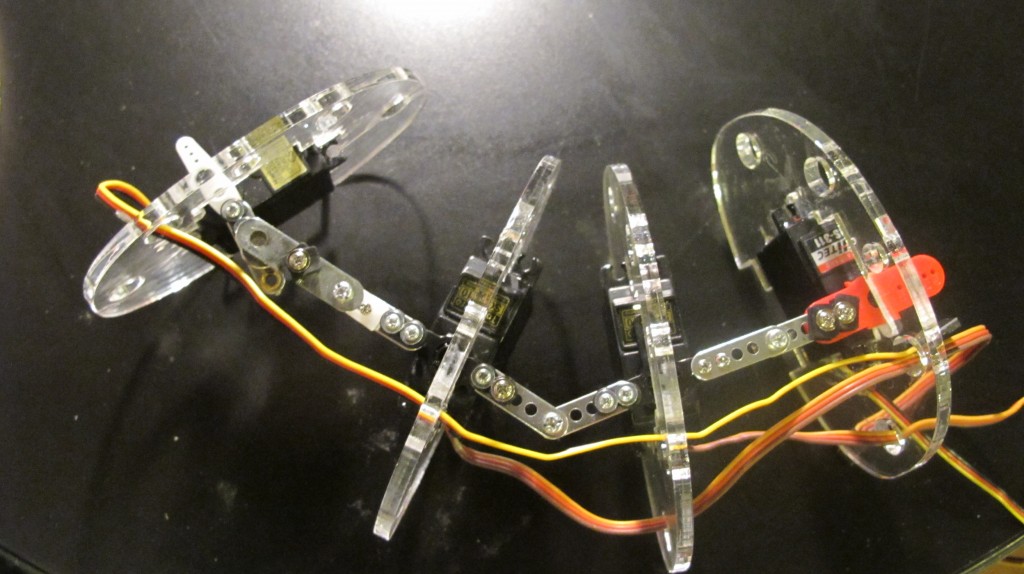
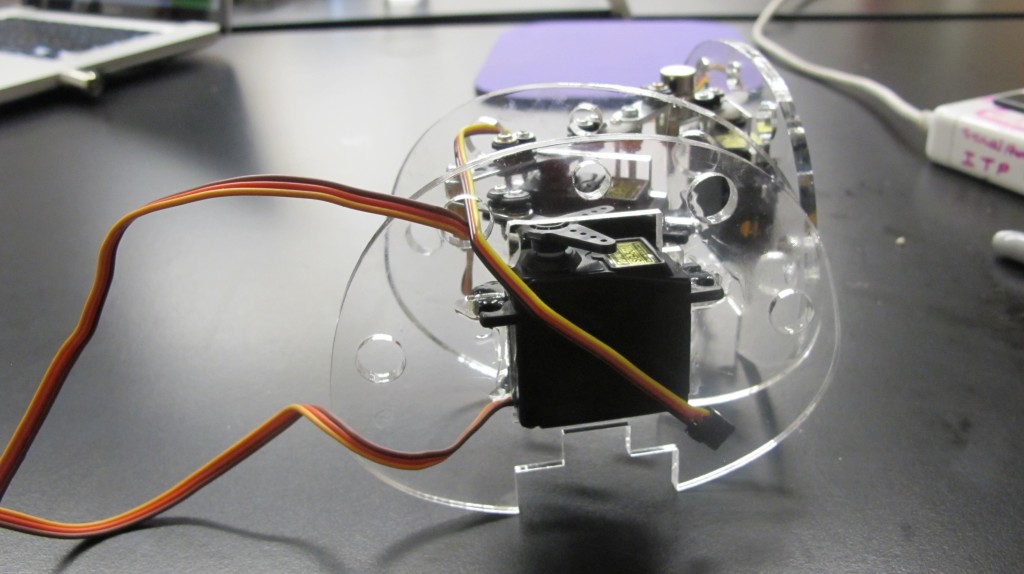
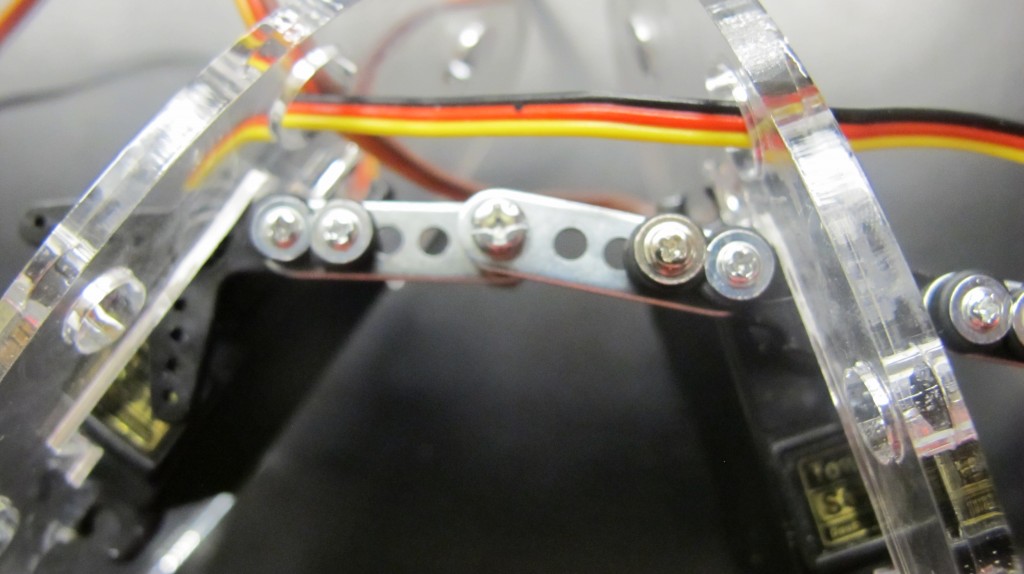
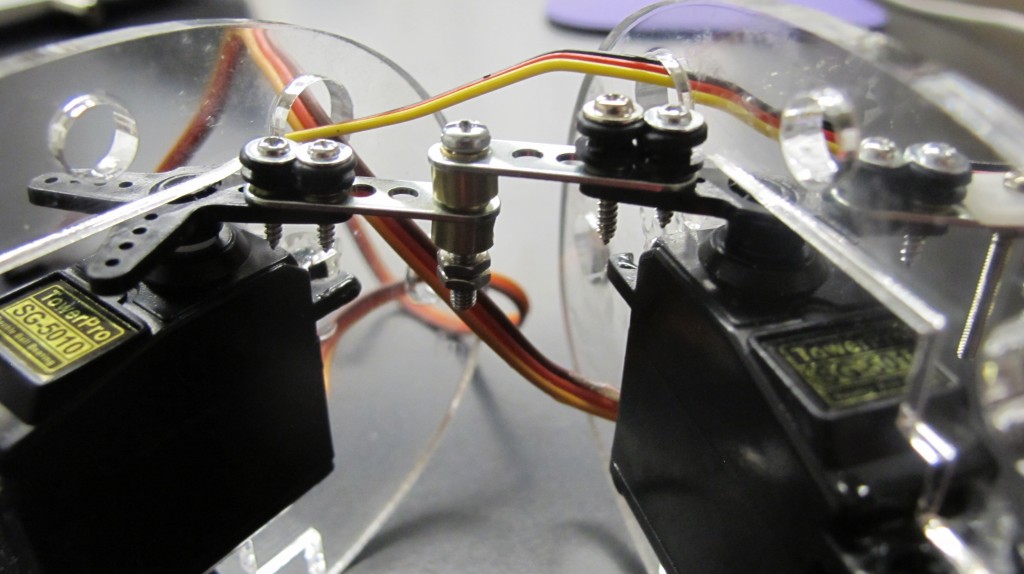
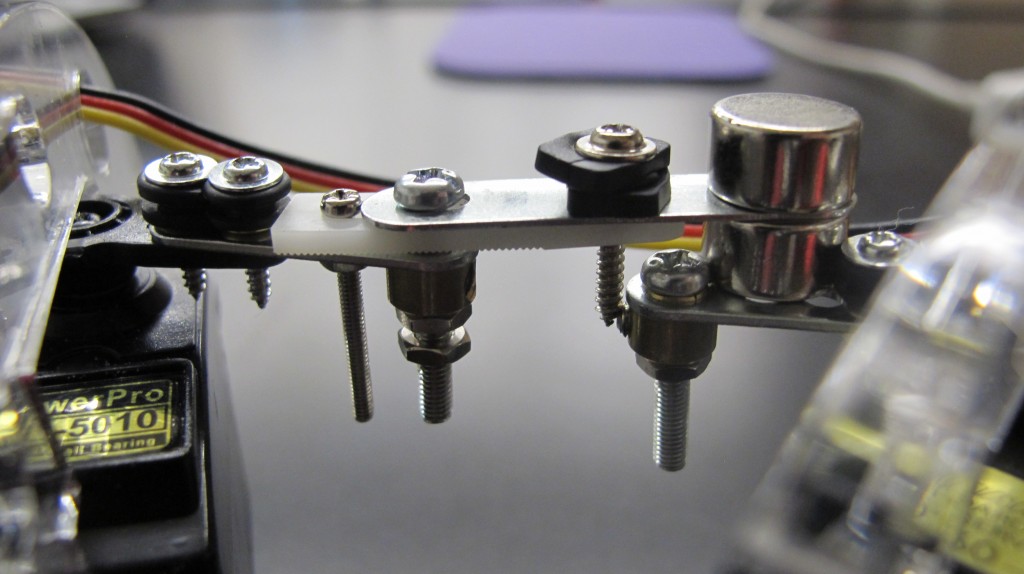
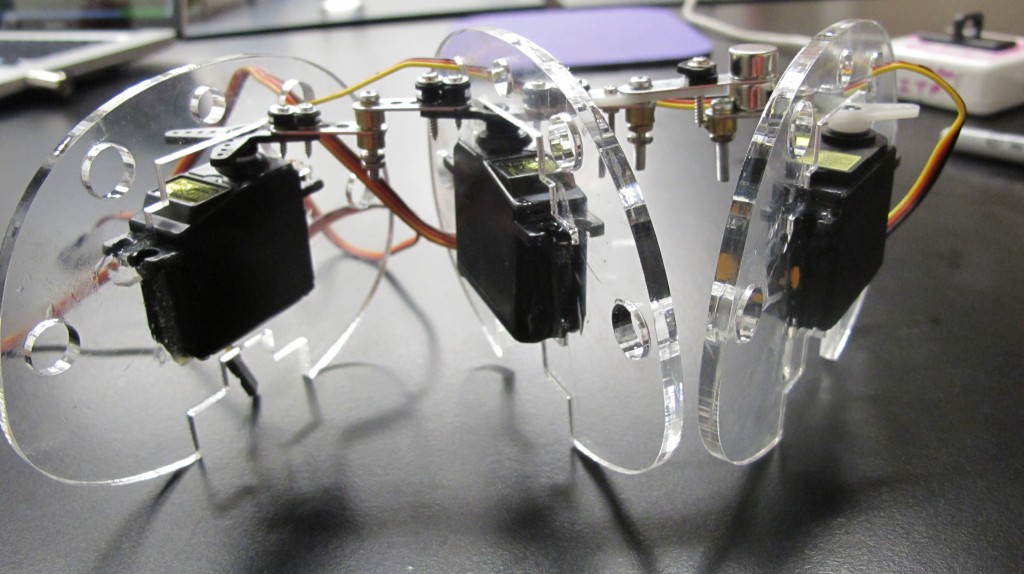
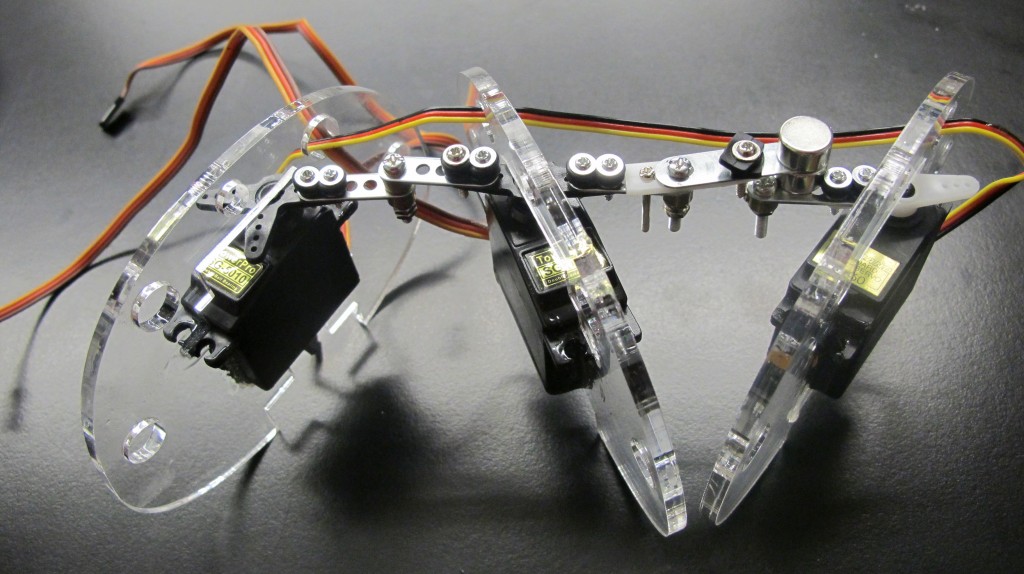
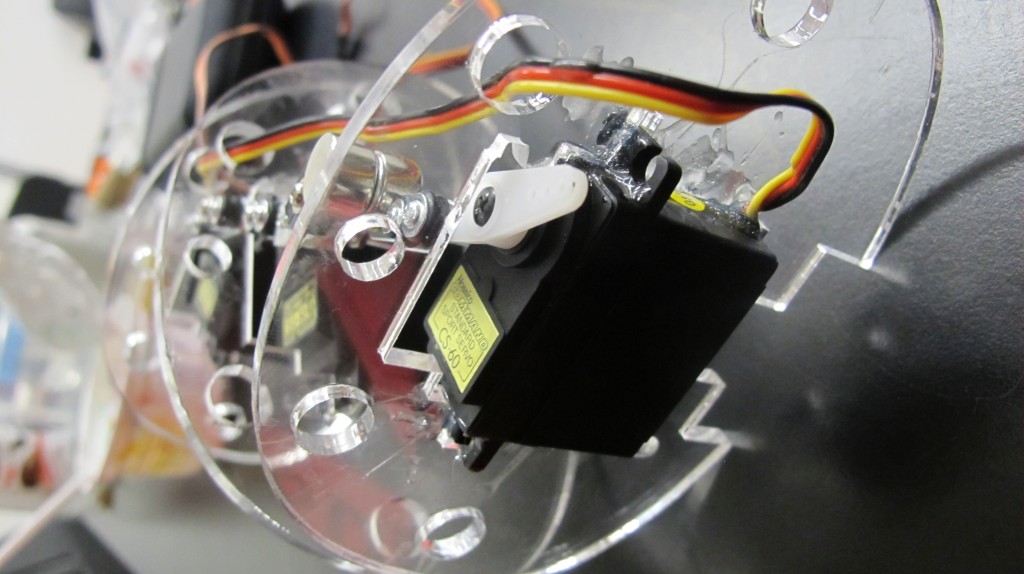
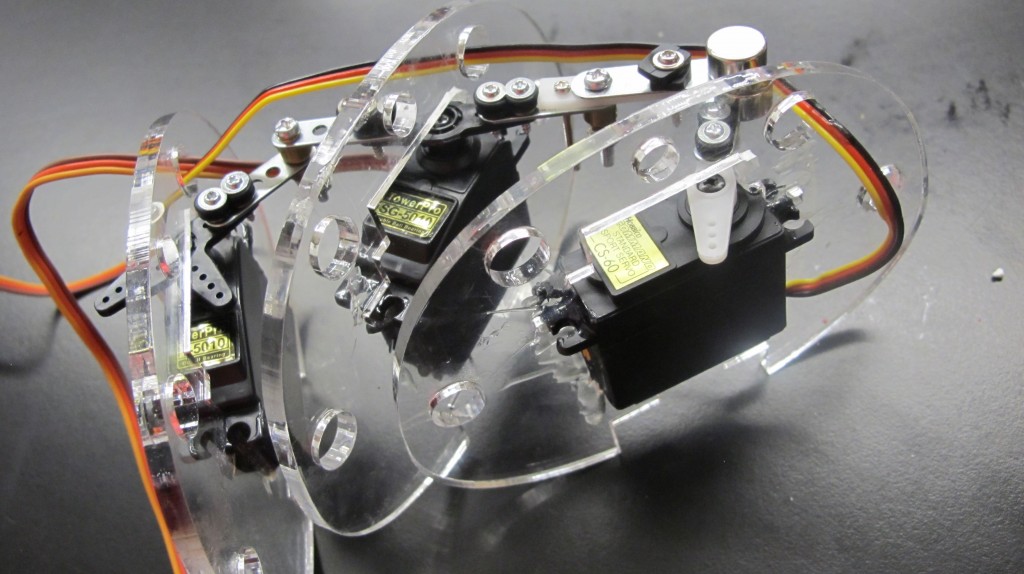
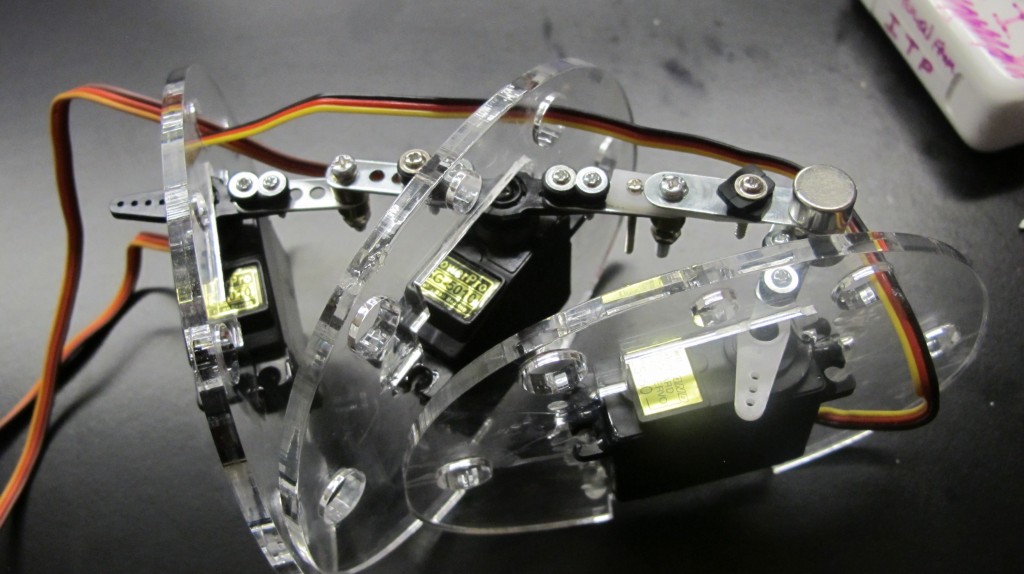
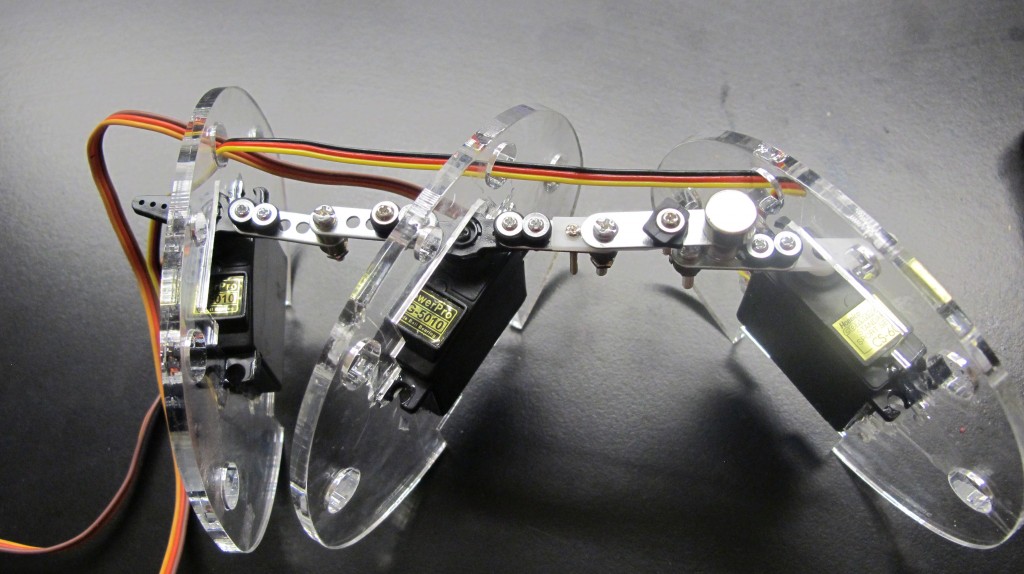
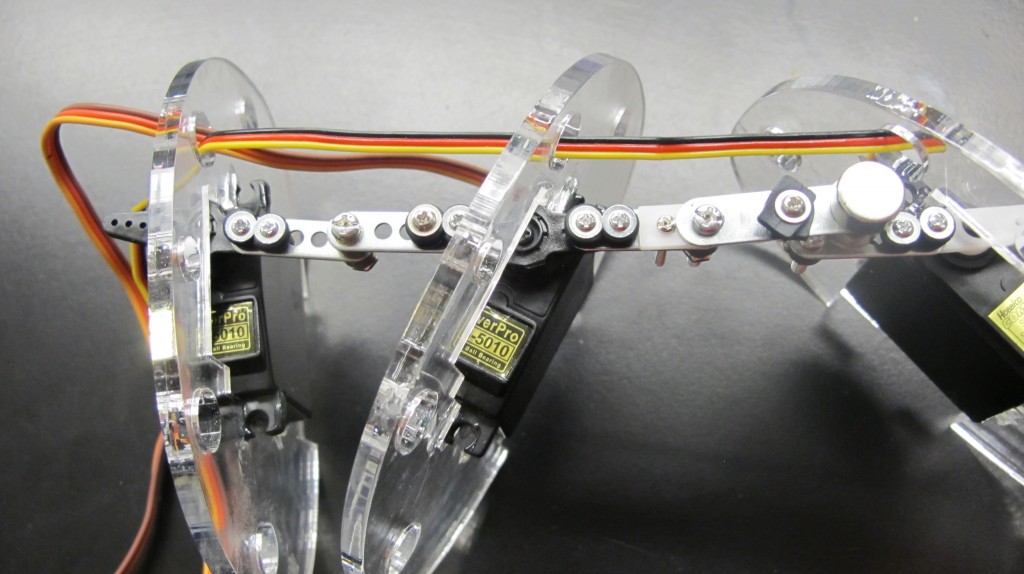
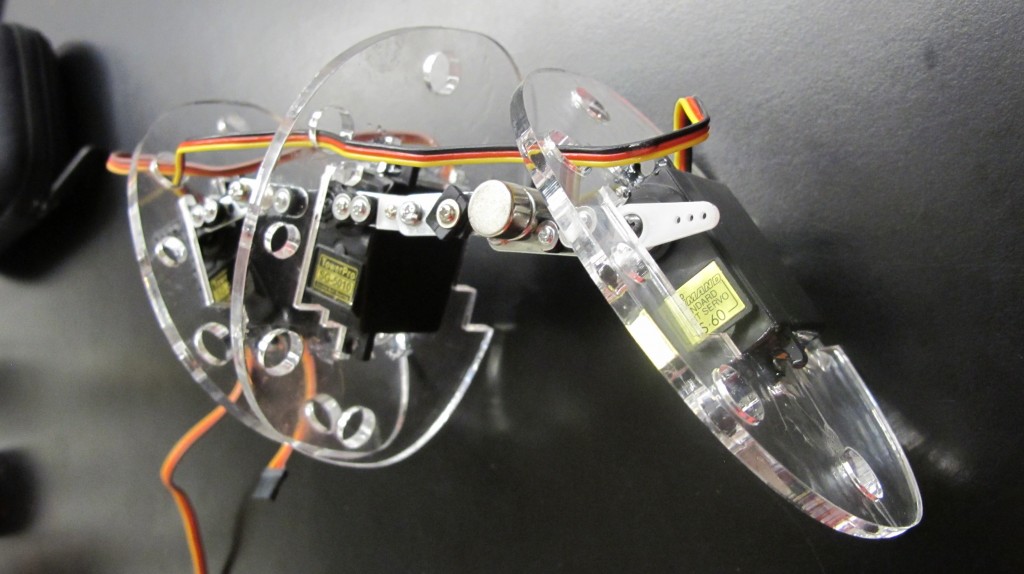
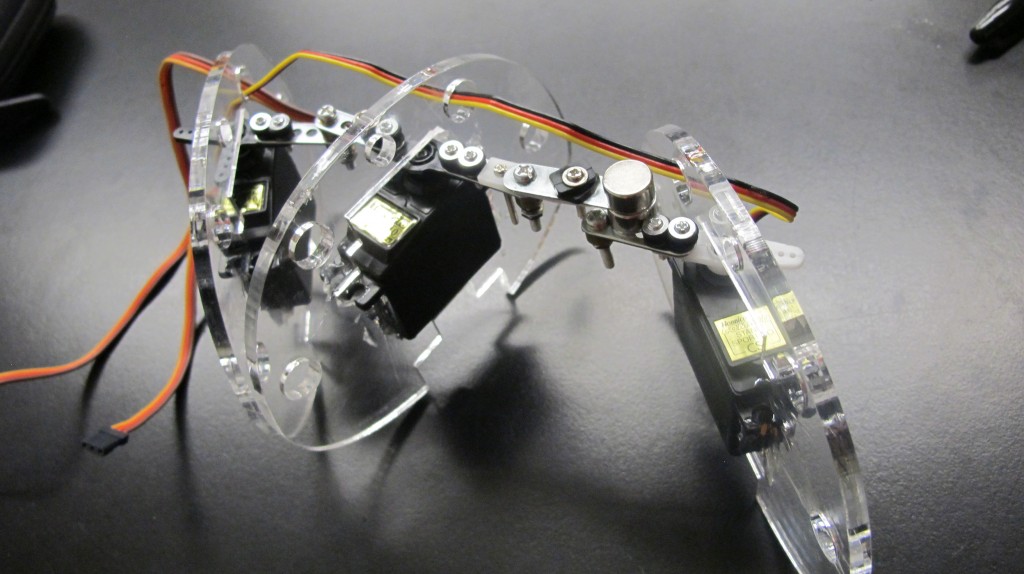
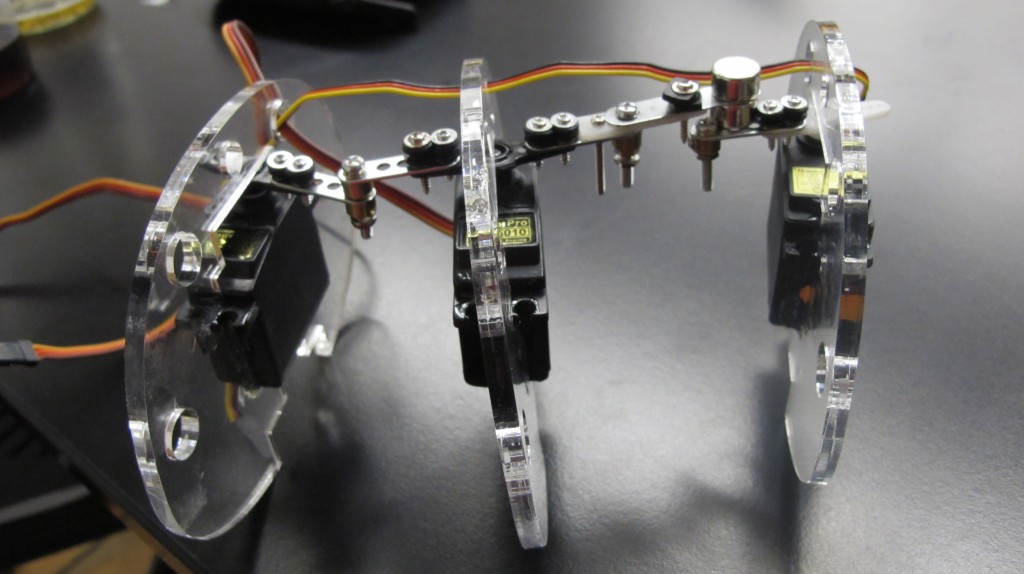
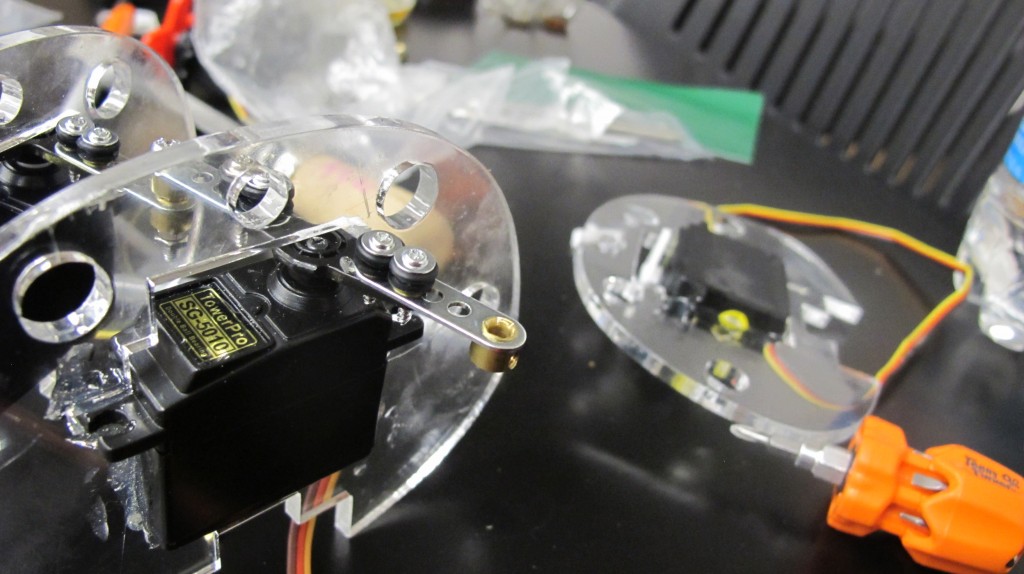
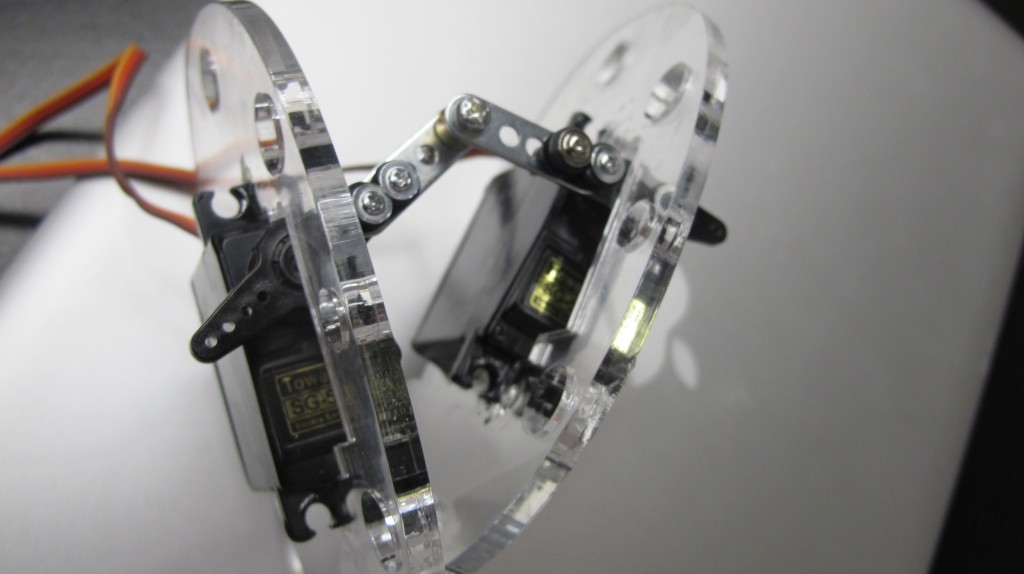
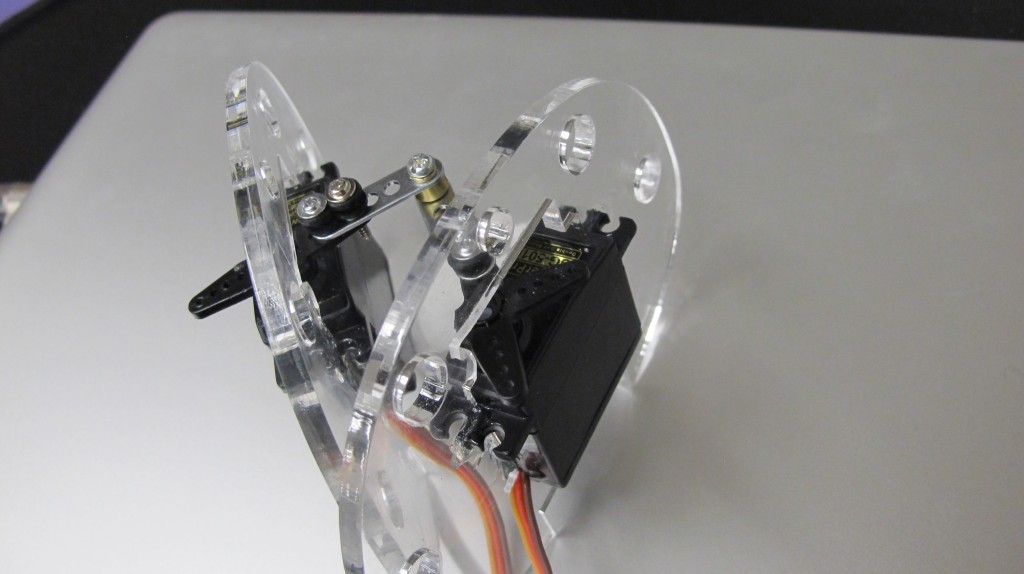
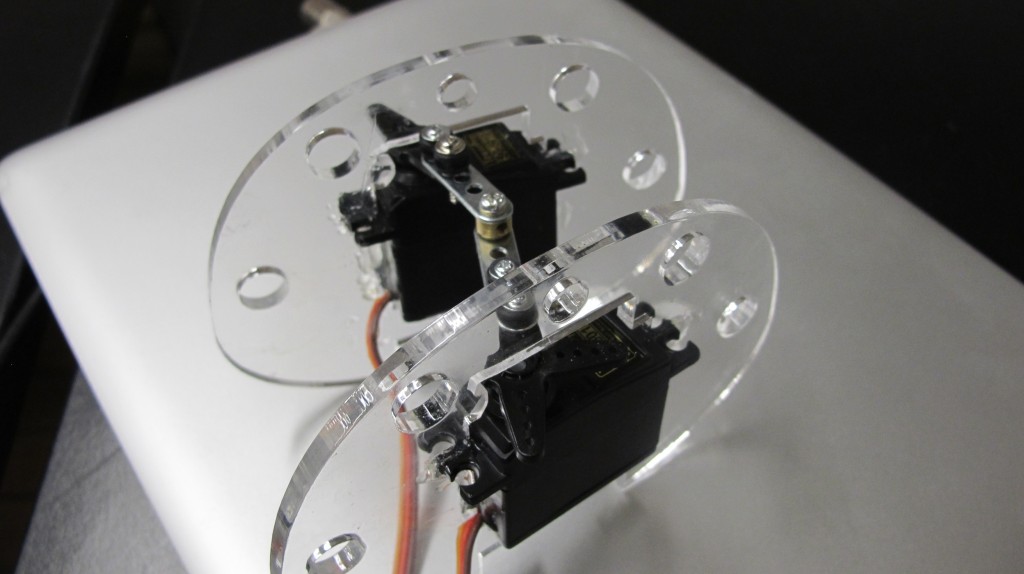
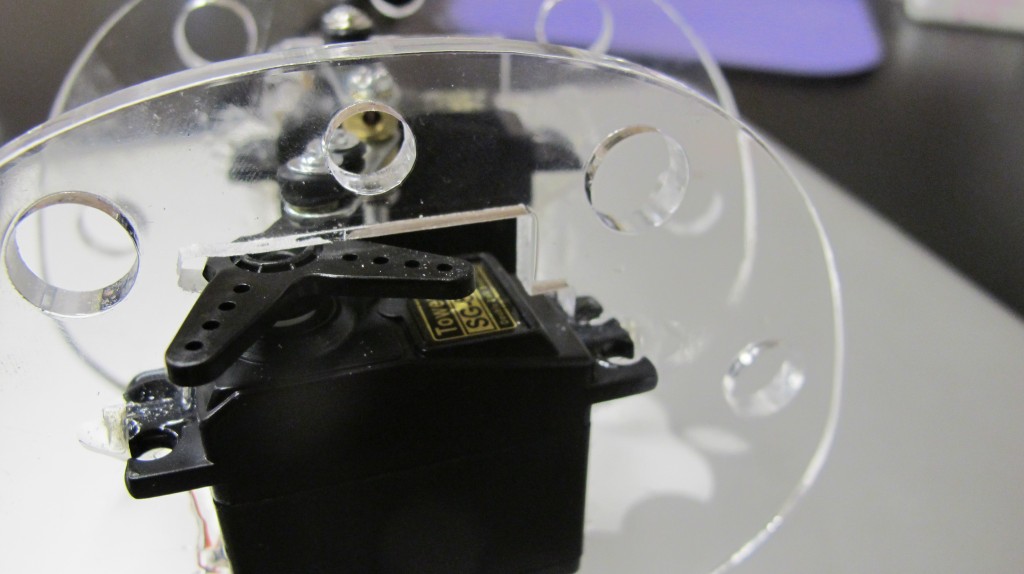
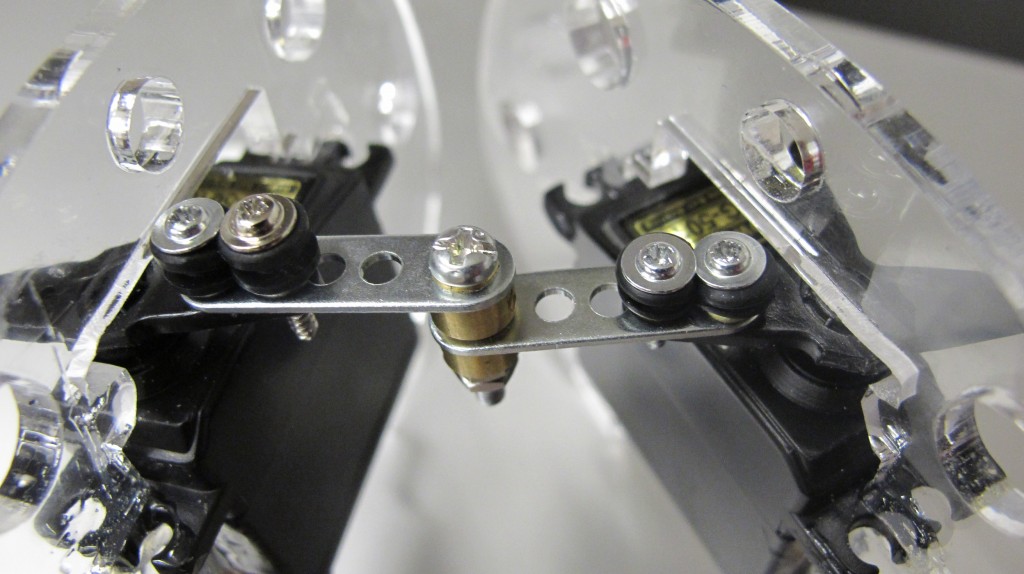
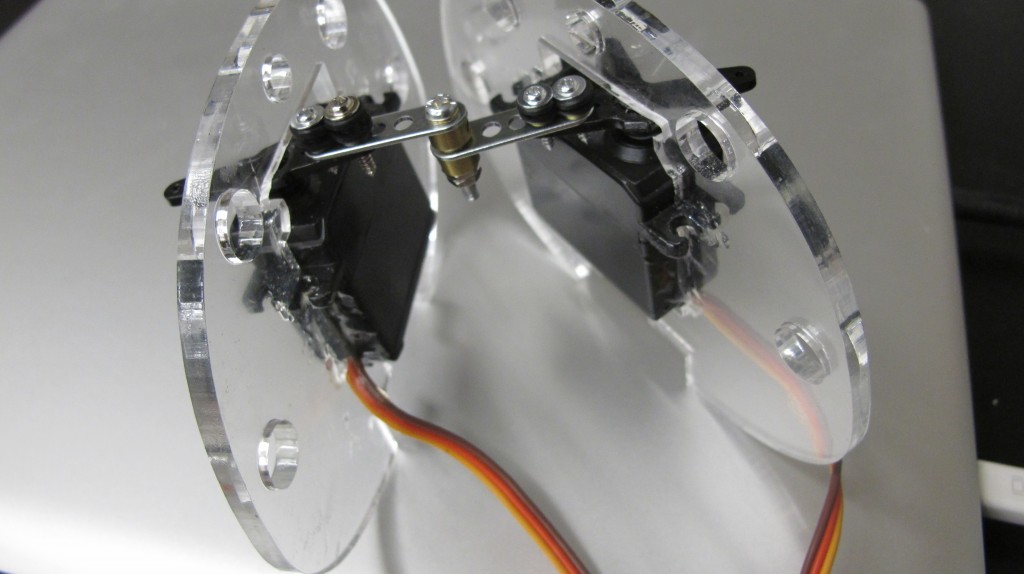
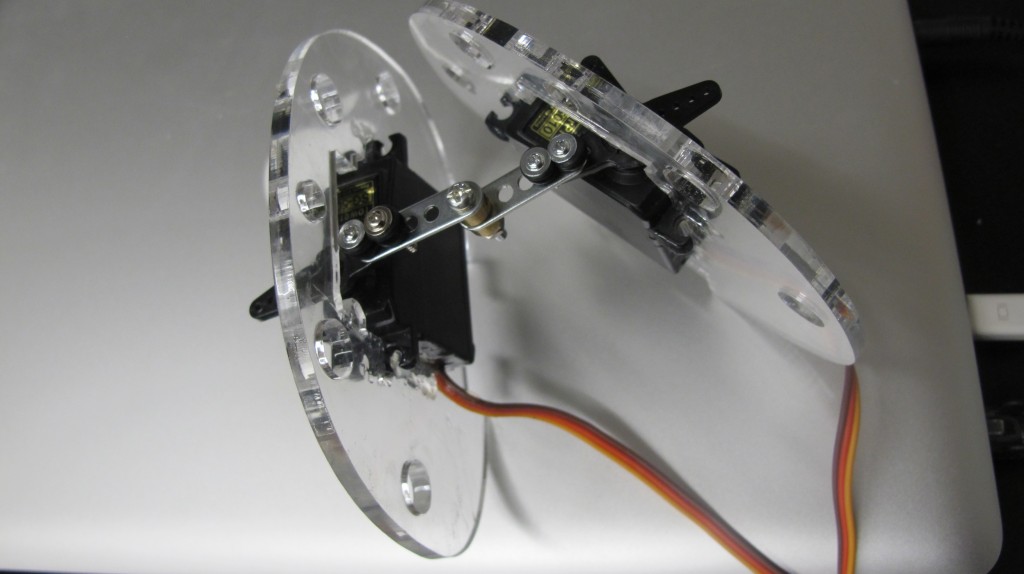
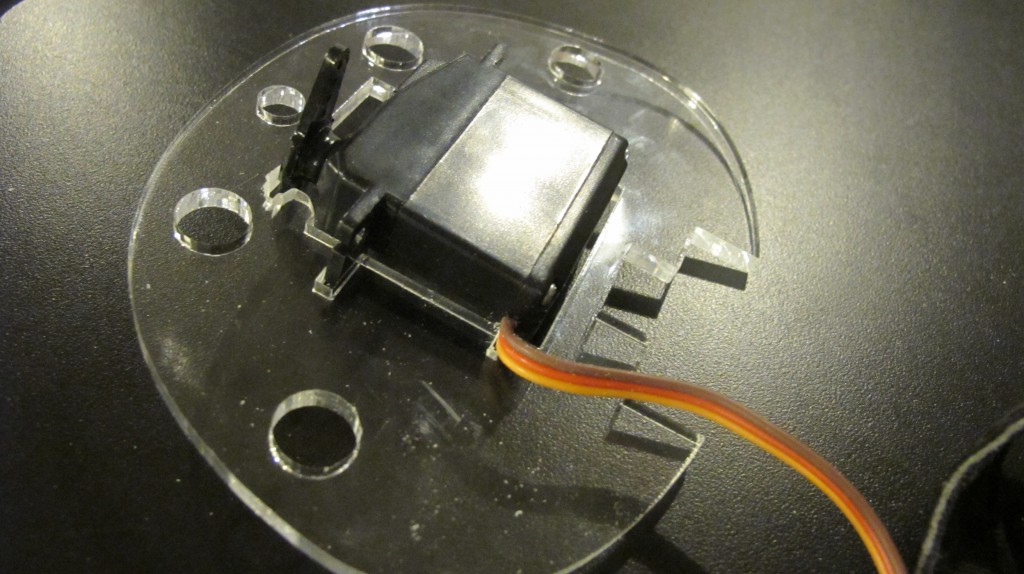
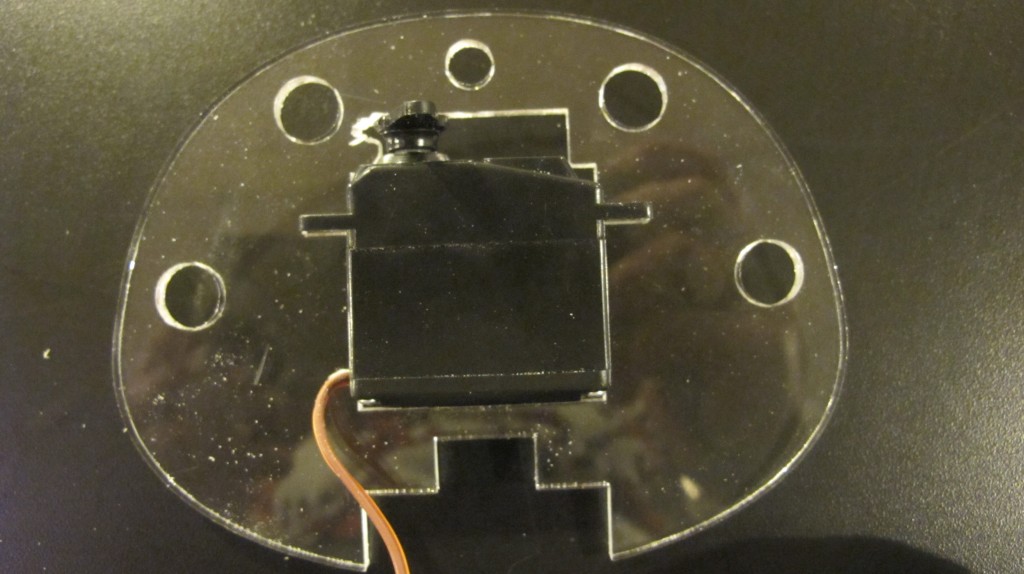
3. Finish the Arduino “snakeWave” class and implement it with the hardware I have started to use to model the snake with servos; Make a software representation of the wave in processing of the individual segments – Software progress : Servo_wave class for arduino
![]()





3a. Gather research papers :
1. Application of AI Techniques for Modelling of a Snake’s Motion, Zenon Chaczko, Perez Moses (Australia)
2. Bio-inspired Agent-based System for Cooperative Decision-making and Control of Unmanned Aerial Vehicles
3. Software Infrastructure for Wireless Sensor and Actuator Networks
4. Ant-Based Topology Convergence Algorithms for Resource Management in VANETs
5. Neuro-Immune-Endocrine (NIE) Models for Emergency Services Interoperatibility
… and more
BOOKS I have :
Neurotechnology for Biomimetic Robots
Self Reconfigurable Robots
Autonomous Robots: From Biological Inspiration to Implementation and Control
Biomechanisms of swimming and flying
3b. A few artists and pieces to look into for ‘maps’ of inspirations:
Alexander McQueen, Untitled Spine Corset
David Cronenberg (and J.G. Ballard), Crash
Tetsuo, Shin’ya Tsukamoto
Natalie Jeremijenko, Amphibious Architecture
U Ram Choe: Custos Cavum
Interview with the creators project
4. map one of your inspirations’ projects based on the criteria in the map/brainstorming session.
URam Choe’s Custos Cavum:
Categories:
· Forms (video, sculpture, website, diorama, comic book, collage).
-sculpture
· Materials (concrete, plexiglass, living tissue, rice paper, cake)
-steel, stainless steel, brass, aluminum, resin, CPUs, motors
· Scale (use analogies: big as a house, small as a marble)
-as big as a large truck in its entirety, (basically the size of a large seal), but parts of the piece span upwards vertically towards the ceiling and horizontally across the floor
· Affects/emotions (clumsy, cheerful, morose, businesslike)
-grandiose, awe-inspiring, courageous, fear inspiring, stoic, cold, uninviting, of fortitude, somber, tranquil, subtle, impressive, magnificient, aggressive, autonomous, iconographic, cosmic, idealic, center, universal, ecstasy, primordial, territorial
· Verbs (motivate, collapse, upset, tickle, spin, collect, etc)
-protect, ward off, illuminate, care, defend, shimmer, breathe, live, cycle, guard, idolize, transcend, destroy, gesture, dominate
· Motivations (why do you want to do/explore this? your reason, underlying impulse, larger aim?)
-explore the feeling of awe and transcendance that one gets from religion (this piece is inspired by Shiva as the Lord of Dance, in India), ie from going into a church or dominating piece of architecture, through a machine
-give life and autonomy to a machine – power it on and it has a life of its own.
-a group of humans come together to give birth to this creation
– explore religion through an object, through the electromechanical design – give it life, and it surely takes on a life of its own, the sum of which is greater than the parts (many humans from different disciplines come together to make a machine that can be more powerful than humans); This creature protects and dominates over its realm; It eventually decays (rusts, dies)
-explore the spiritual through a machine creation that resembles life but does not mimic it.
· Inspirations (projects, people, contexts that inspire you to follow this hunch)
-Buddhism, life cycle,
-transformation of human psychology by modern technology
-beauty in the grotesque
-Theo Jansen – the fusion of nature and technology with nothing but power from the natural world (wind in some cases)
-Rube Goldberg, Alexander Calder, Arthur Ganson, Lyman Whitaker, László Moholy-Nagy (and other kinetic sculptors)
-Tetsuo (metal fetishist)
· Ideal audiences (be specific: Guyanese senior citizens, tech geeks in Brooklyn or Fukushima, 3-5 yr old Americans, white hipsters, demographic, economic, social circles)
-Upper west side shrinks, Asian Buddhists and non-Buddhists, Artists and hobbyists fascinated with kiinetics, artists of all sorts, kids, serious people, spiritualists, people who love literature and/or history
· Context/location (gallery, dark alley, the internet, public park, suburban cul-desac)
-vast space, atrium, lobby, serene place, gallery or museum or performance space
Lastly, take your temperature on what you discovered or explored today in class:
· What are the first steps?
-firmware (Arduino), hardware model, mechanical platform, hone in on how to talk about the concept of this – unite the functionality of these robots with the aesthetic vision I have
· Is it big enough to interest you for a whole semester?
-Yes
· If it is enormous, what aspect of this core idea can you tackle?
-It is enormous, so I am tacking not what interests me utmost (the hardware of a joint system for a modular self assembling robot made up of multiple independent units) but the aesthetics of one developed biomimetic snake robot that is a more developed version of smaller open source models and prototype for which I will have DIY kits, for small functioning skeletons of a robotic boat that can do things like: clean up polluted waters, biological sampling, nuclear waste monitoring; larger environmental impacts: crowdsourced oil spill cleanup with swarms of drones…
The Bellflower Project
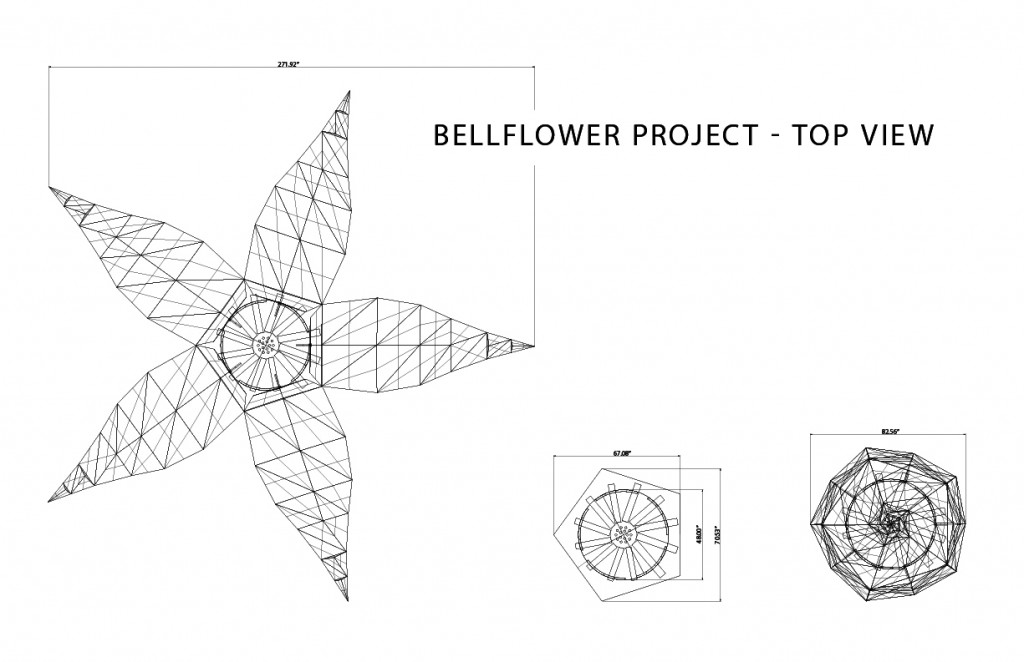
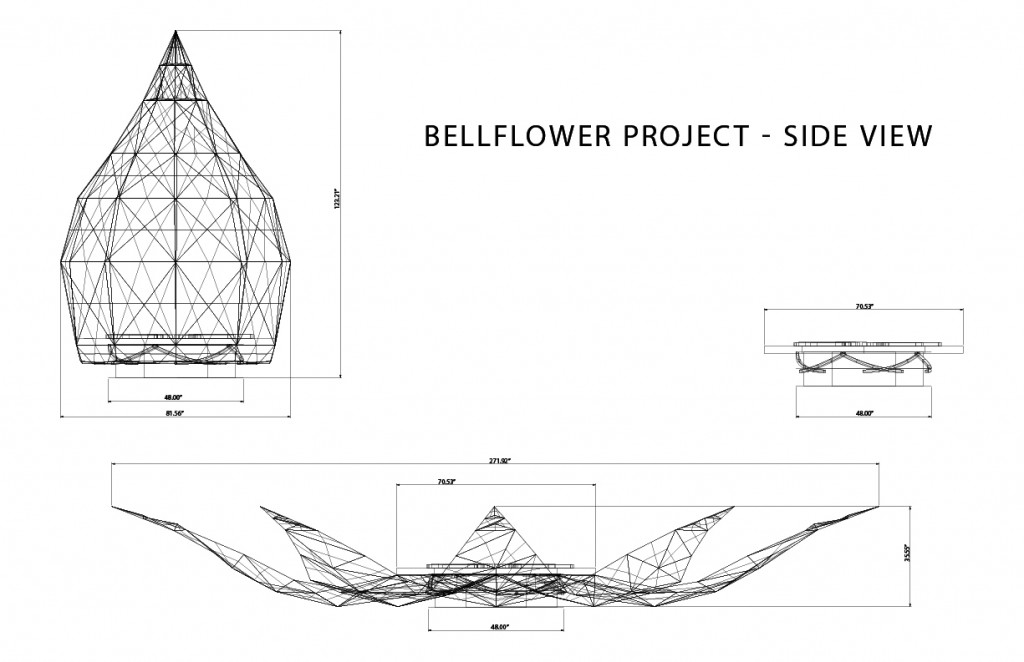
The Bellflower Project will showcase the potential of sustainable energy sources. By engaging the public in a creative, non-institutional way, we are hoping to show (not tell) the NYU and larger community the benefits of energy harvesting. The Bellflower project is a series of small, public kinetic sculptures that run on solar power. Each “bellflower” biomimetically recreates an opening flower – five petals will slowly open as they collect solar energy, revealing a spiral of musical bars (like large xylophone bars). As the sculpture gathers energy, the bars begin to play, creating unique melodies and chords that vary depending on weather conditions and time of day. Ideally, the project would be embedded in an urban agriculture garden, promoting biodiversity while demonstrating the power of sustainable energy harvesting. Our goal is to aesthetically improve the quotidian life of the community, as well as potentially educating the public about environmentally responsible power consumption.